Ռոբոտ


Ռոբոտ, համակարգչով ծրագրավորվող մեքենա, որն ընդունակ է ավտոմատ կերպով կատարել բարդ գործողությունների հաջորդականություն։ Ռոբոտները կարող են կառավարվել արտաքին կամ ներդրված կառավարման սարքերով[2]։ Ռոբոտները կարող են լինել մարդանման (հումանոիդ), բայց դրանց մեծ մասը նախատեսված է որևէ գործողություն կատարելու համար՝ առանց կարևորելու արտաքին տեսքը։
Ռոբոտներն ըստ կառավարման լինում են ավտոմատ կամ կիսաավտոմատ, ըստ արտաքին տեսքի և նշանակության՝ մարդանման (օր․՝ ճապոնական Հոնդա ընկերության քայլող ASIMO և TOSY ընկերության պինգ պոնգ խաղացող ռոբոտները (TOPIO)), արդյունաբերական, բժշկական, հիվանդների օժանդակ, շների թերապիայի, համատեղ ծրագրավորված կոլեկտիվ ռոբոտներ, անօդաչու թռչող սարքեր (ԱԹՍ) կամ դրոններ (General Atomics MQ-1 Predator), և նույնիսկ շատ փոքր նանո ռոբոտներ։ Նմանակելով մարդու իրական արտաքին տեսքը և շարժումները ռոբոտները կարող են հաղորդակցվել[3]։ Սպասվում է, որ առաջիկա տասնամյակում ավտոմատացումը մեծ տարածում կգտնի։ Կստեղծվեն տնային օգնական ռոբոտներ, մեքենաներ առանց վարորդների և այլն[4]։
Տեխնիկայի այն բնագավառը, որը զբաղվում է ռոբոտների նախագծմամբ, պատրաստմամբ և կիրառմամբ, ինչպես նաև դրանց կառավարման կոմպյուտերային համակարգերի, տվիչային հետադարձ կապի և ինֆորմացիայի մշակմամբ անվանում են ռոբոտատեխնիկա[5]։ Այն գործ ունի ավտոմատ մեքենաների հետ, որոնք կարող են փոխարինել մարդկանց վտանգավոր միջավայրերում աշխատելիս, արտադրական գործընթացներում, նմանակել մարդկանց տեսքը, վարքը և խոսքը։ Ժամանակակից շատ ռոբոտների նախագծերի հիմքում ընկած են կենդանի օրգանիզմները։ Արդյունքում ձևավորվեց ռոբոտատեխնիկայի նոր ճյուղ՝ այսպես կոչված «փափուկ» ռոբոտներ։
Դեռ հին քաղաքակրթությունների ժամանակաշրջանից կան կարգավորվող ավտոմատ սարքերի մասին հիշատակություններ և նույնիսկ կենդանիների կամ մարդու նմանությամբ սարքեր՝ նախատեսված հիմնականում զվարճանքի համար։ Արդի զարգացած արդյունաբերական դարաշրջանում առաջացան ավելի գործնական կիրառություններ՝ ավտոմատ մեքենաներ, անլար կամ լարային հեռակառավարմամբ ռոբոտներ։
Տերմինը վերցվել է չեխերեն robota`«հարկադիր աշխատող» բառից, որն առաջին անգամ օգտագործել է չեխ գրող Կարել Չապեկը «R. U .R. (Rossum's Universal Robots)» (Ռոսսումի Ունիվերսալ Ռոբոտները) պիեսում (1920 թվական), բայց բառի իսկական հեղինակը նրա եղբայրն է՝ Ժոսեֆ Չապեկը[6][7][8]։ Վիլյամ Գրեյ Ուոլտերի (Բրիստոլ, Անգլիա 1948 թվական), Ջոն Թ․ Փարսոնսի և Ֆրենկ Լ․ Ստուլենի (համակարգչային թվային կառավարման միջոցներ (CNC)) ստեղծած առաջին էլեկտրոնային ռոբոտների ի հայտ գալուց հետո Էլեկտրոնիկան վերածվեց տեխնիկայի զարգացման շարժիչ ուժի։ Առաջին կոմերցիոն, թվային և ծրագրավորվող ռոբոտը պատրաստել է Ջորջ Դեվոլը 1954 թվականին և անվանվել է Unimate։ Այն վաճառվել է General Motors-ին 1961 թվականին, որտեղ այն օգտագործվեց բարձրացնելու համար մետաղի տաք ձուլակտորներ (Inland Fisher Guide Plant ընկերություն, արևմտյան Տրենտոն, Էվինգ ավան, Նյու Ջերսի)[9]։
Ռոբոտները փոխարինում են մարդկանց[10] կրկնվող և վտանգավոր գործողություններ կատարելիս, որոնք մարդիկ նախընտրում են չանել կամ ի վիճակի չեն անելու՝ չափերի սահմանափակումների պատճառով կամ որոնք պետք է կատարվեն էքստրեմալ միջավայրերում՝ տիեզերք, ծովի հատակ և այլն։ Կան մտահոգություններ կապված ռոբոտների կիրառման աճող տեմպերի և հասարակությունում դրանց դերի հետ[11]։ Ռոբոտներին մեղադրում են տեխնոլոգիական գործազրկության աճի համար, քանի որ դրանք փոխարինում են աշխատողներին ֆունկցիոնալության բարձրացման նպատակով։
Վարկածներ կան, որ ռոբոտները գրավելու են աշխարը։ 2023թ․ միջազգային ժողովներից մեկում ռոբոտին հարց են տվել, ինչ են պատրասվում անել ռոբոտները․ նա պատասխանել է․
-ոչնչացնել աշխարհը
Հետագայում այս ռոբոտին ոչնչացրին։
Ամփոփում
[խմբագրել | խմբագրել կոդը]

«Ռոբոտ» բառը կարող է վերբերվել և ֆիզիկական ռոբոտներին և վիրտուալ ծրագրային ապահովման միջոցներին, բայց վերջիններին հաճախ անվանում են բոտ[12]։ Միանշանակ որոշում չկա, թե որ մեքենաներն են համարվում ռոբոտներ, բայց գոյություն ունի ընդհանուր համաձայնություն մասնագետների և հանրության միջև, որ ռոբոտները, որպես կանոն, պետք է ամբողջովին կամ մասամբ ունենան հետևյալ ֆունկցիաները․ լինեն էլեկտրոնային ծրագրավորվող, ավտոնոմ ռեժիմով կառավարեն ազատության որոշ աստիճաններ, լինեն շարժունակ, կառավարել իրենց մարմնի մասերը կամ ֆիզիկական պրոցեսները, զգալ և կառավարել իրենց միջավայրը, դրսևորել ինտելեկտուալ վարք (վերաբերում է հատկապես մարդկանց և կենդանիներին նմանակող ռոբոտներին)[13][14]։ Ռոբոտ հասկացության հետ սերտորեն կապված է նաև սինթետիկ կամ արհեստական կենսաբանության բնագավառը, որի ուսումնասիրության առարկան հիմնականում կենդանի օրգանիզմներն են, այլ ոչ թե մեքենաները։
Պատմությունը
[խմբագրել | խմբագրել կոդը]Ավտոմատացման գաղափարը հանդիպում է աշխարհի շատ մշակույթների դիցաբանություններում։ Դեռևս անտիկ քաղաքակրթությունների, այդ թվում հին Չինաստանի[15], Հունաստանի, Եգիպտոսի[16] ինժեներները և գյուտարարները փորձել են պատրաստել ինքնակառավարվող մեքենաներ, դրանցից որոշները՝ մարդկանց կամ կենդանիների նմանությամբ։ Ավտոմատացման ամենավաղ նկարագրությունները ներառում են Արքիտասի[17] արհեստական աղավնիները, Մոցզիի և Լու Բանի[18] արհեստական թռչունները, Հերոն Ալեքսանդրիացու խոսացող ավտոմատը, Փիլոն Բյուզանդացու ավտոմատ լվացարանը, Լե Ցզիի նկարագրած մարդու ավտոմատացումը։
Առաջին օրինակները
[խմբագրել | խմբագրել կոդը]

Շատ անտիկ դիցաբանություններում և շատ ժամանակակից կրոններում կան արհեստական մարդիկ, ինչպիսին են մեխանիկական ծառաները՝ ստեղծված հունական աստված Հեփեստոսի կողմից[20], կավե հսկաները հրեական և հյուսիսի լեգենդներում, Գալատեան՝ Պիգմալիոնի առասպելական արձանը, որն ըստ առասպելի վերակենդանացել է։ Սկսած Ք․ա․ 400 թվականից Կրետեի դիցաբանությունում հանդիպում է Թալոսը՝ բրոնզե մարդը, որը պաշտպանում էր Կրետե կղզին ծովահեններից։
Հին հունաստանում ինժեներ Քտեսիբիուսը (Ք․ա․ 270 թվական․) կիրառեց պնևմատիկայի և հիդրավլիկայի իմացությունը շարժական մասերով օրգան-ժամացույցների և ջրային ժամացույցների արտադրւթյան համար[21][22]։ Ք․ա․ 4-րդ դարում հույն մաթեմատիկոս Արքիտասն առաջարկեց գոլորշիով աշխատող մեխանիկական թռչուն, որն անվանեց Պիգեոն։ Հույն մաթեմատիկոս և գյուտարար Հերոն Ալեքսանդրիացին (10-70 մ․ թ․), , ստեղծել է բազմաթիվ կարգավորվող ավտոմատ սարքեր և նկարագրել է օդի ճնշմամբ և գոլորշիով աշխատող մեքենաներ[23]։
11-րդ դարում Լոկապանատին պատմել է այն մասին, թե ինչպես են Բուդդայի մասունքները պաշտպանվել Հռոմից բերված մեխանիկական ռոբոտներով, որոնց այնուհետև զինաթափել է Աշոկա[24] [25] թագավորը։
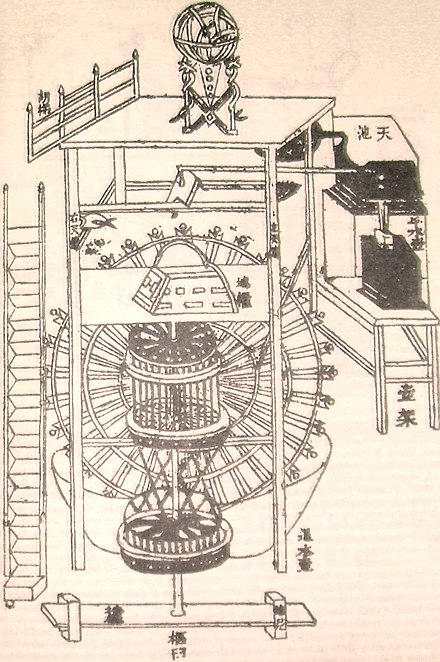
Հին Չինաստանում Լաո Ցզիի 3-րդ դարի տեքստերում նկարագրվում են ավտոմատ հումանոիդներ, որոնք վեճի առարկա են դառնում Չինական կայսր Մու Չժոուի և ինժեներ մեխանիկ Յան Շիի միջև, ով հպարտորեն ներկայացրեց թագավորին բնական չափերով հումանոիդ՝ պատրաստված կաշվից, փայտից և արհեստական օրգաններից։ Կան նաև թռչող սարքերի մասին հիշատակություններ Հան Ֆեյ Ցզիի և այլոց տեքստերում, որոնք իրենց ազդեցությունն ունեցան են Ք․ա․ 5-րդ դարի մոհիստ փիլիսոփա Մոցզիի և նրա ժամանակակից Լու Բանի արհեստական փայտե թռչունների ստեղծման գործում, որոնք կարող էին հաջողությամբ թռչել։ 1066 թվականին չինացի գյուտարար Սու Սոնգը պատրաստեց աշտարակի տեսքով ջրային ժամացույց։
Ավտոմատացման սկիզբն ասոցացվում է Սու Սոնգի աստղագիտական ժամացույց-աշտարակի հայտնագործման հետ[26][27][28]։ Այն ուներ ծրագրավորվող բռունցքային մեխանիզմով թմբուկ-մեքենա, որոնց բախվում են փոքր լծակներով կառավարվող հարվածային գործիքները։ Փոփոխելով բռունցքների դիրքերը, թմբուկը կարող է կարգաբերվել և նվագել տարբեր ռիթմեր։
Բհոջայի սանսկրիտյան տրակտատ Samarangana Sutradhara-ն ունի մեխանիկական ռոբոտների պատրաստման վերաբերյալ առանձին գլուխ, որտեղ նկարագրված են մեխանիկական ճանճեր և թռչուններ, մարդկանց և կենդանիների տեսքով շատրվաններ, տղամարդկանց և կանանց տիկնիկներ, որոնք լցնում էին յուղի ճրագները, պարում էին, նվագում էին տարբեր գործիքներ և ներկայացնում հնդկական դիցաբանությունից տեսարաններ[29][30][31]։
Վերածննդի դարաշրջանի Իտալիայում Լեոնարդո դա Վինչին (1452-1519 թվականներ) ստեղծել է հումանոիդ ռոբոտի էսքիզներ հավանաբար 1495 թվականին[19]։ Դա Վինչիի նոթատետրերը, որոնք կրկին հայտնաբերվեցին 1950 ական թվականներին, պարունակում են մեխանիկական ասպետի, այժմ հայտնի որպես «Լեոնարդոի ռոբոտ»-ի մանրամասն գծագրեր։ Այն ընդունակ է նստել, շարժել ձեռքերը, գլուխը և ծնոտը[32]։ Գծագրերը հավանաբար հիմնված են նրա անատոմիական հետազոտությունների վրա, որոնք նկարագրված են «Վիտրուվյան մարդը» աշխատությունում։ Հայտնի չէ, թե արդյոք նա փորձել է պատրաստել ռոբոտը թե ոչ։
Ճապոնիայում բարդ կենդանիների կամ մարդու նմանությամբ ռոբոտներ պատրաստվել են 17-ից 19-րդ դարերում։ Նրանցից շատերը նկարագրված են կարակուրի ցու -ում (նկարազարդ մեքենաներ, 1796 թվական)․ Այսպիսի սարքերից է նինգե կարակուրին (մեքենայացված տիկնիկներ)[33]։ Գոյություն ունեն կարակուրիի տարբեր վարիացիաներ՝ Բութայ, որն օգտագործվել է թատրոնում, Զաշիկի՝ փոքր էին և օգտագործվում էին տանը, Դաշի՝ օգտագործվում էին կրոնական միջոցառումներում և որտեղ տիկնիկներն օգտագործվում էին առասպելների բեմադրման համար։
Ֆրանսիայում 1738-ից 1739 թվականներին, Ժակ դը Վուկանսոնը ներկայացրեց որոշ բնական չափերով ռոբոտներ․ ֆլեյտա նվագող, շեփոր նվագող և բադ։ Մեխանիկական բադը կարող էր բացել-փակել թևերը, ձգել վիզը և կուլ տալ կերը ներկայացնողի ձեռքից և ստեղծել կերի մարսման իլյուզիա՝ արտազատելով նյութ, որը նախօրոք պահվում էր անտեսանելի խցիկում[34]։
Հեռակառավարվող համակարգեր
[խմբագրել | խմբագրել կոդը]
Հեռակառավարվող մեքենաներ ցուցադրվել են 19-րդ դարի վերջերին՝ մի քանի տեսակի հեռակառավարվող տորպեդների տեսքով։ 1870 ականների սկզբներին ի հայտ եկան Ջոն Էրիկսոնի (պնևմատիկ), Ջոն Լուիս Լեյի (էլեկտրական հաղորդալարով) և Վիկտոր ֆոն Շելիհայի (էլեկտրական հաղորդալարով) հեռակառավարվող տորպեդները[35]։
Բրենանի տորպեդը՝ հայտնագործված Լուիս Բրենանի կողմից 1877 թվականին, օժտված էր երկու հակառակ ուղղություններով պտտվող պրոպելերներով, որոնք պտտվում էին` թմբուկներից դուրս քաշելով տորպեդի ներսում փաթաթված լարերը։ Ափի կայանին ամրացված լարերով ապահովվում է տորպեդի փոփոխական արագությունը և թույլ է տալիս նրան ուղղվել դեպի նպատակակետը, դարձնելով այն աշխարհի առաջին գործնականում կառավարվող հրթիռը[36]։ 1897 թվականին բրիտանացի գյուտարար Էռնեստ Վիլսոնը ստացել է ռադիոալիքներով հեռակառավարվող տորպեդի արտոնագիր[37][38]։ 1898 թվականին Նիկոլա Տեսլան հրապարակավ ցուցադրեց անլար կառավարվող տորպեդ, որը նա հույս ուներ վաճառել Միացյալ Նահանգների նավատորմին[39][40]։
Արչիբադ Լոուն, ով առաջին աշխարհամարտի ժամանակ առաջին կառավարվող հրթիռների և ինքնաթիռների հեղինակն է, հայտնի է որպես ռադիոկառավարման համակարգերի հայր։ 1917 թվականին նա ներկայացրեց հեռակառավարվող առաջին ինքնաթիռը անգլիայի թագավորական օդուժին և միևնույն տարում պատրաստեց առաջին լարով կառավարվող հրթիռը։
«Ռոբոտ» տերմինի ծագումը
[խմբագրել | խմբագրել կոդը]Տերմինը վերցվել է չեխերեն robota`«հարկադիր աշխատող (ստրուկ)» բառից, որն առաջին անգամ օգտագործել է չեխ գրող Կարել Չապեկը «R. U .R. (Rossum's Universal Robots)» (Ռոսսումի Ունիվերսալ Ռոբոտները) պիեսում (1920 թվական), սակայն բառի իրական հեղինակը նրա եղբայրն է՝ Ժոսեֆ Չապեկը[7][8]։ Ռոբոտ տերմինը ինքնին նոր չէ, այն հանդիպում է Սլավոնական լեզուներում և բնութագրում էր 15-րդ դարի Եվրոպայում լայնորեն տարածված ֆեոդալական կարգերի գյուղացիներին (տես․՝ ռոբոտի արտոնագիրը)[41][42]։
Առաջին ռոբոտները
[խմբագրել | խմբագրել կոդը]
1928 թվականին Վ․ Հ․ Ռիչարդսի պատրաստած առաջին հումանոիդ ռոբոտ «Eric»-ը ներկայացվել է Լոնդոնի ինժեներ-նախագծողների ամենամյա ցուցադրությունում։ Ռոբոտի հիմնական բաղկացուցիչներն էին ալյումինե կարկասը, 11 էլեկտրամագնիսները և մեկ շարժիչը՝ միացված 12 Վոլտ լարմամբ հոսանքի աղբյուրին։ Ռոբոտը կարող էր շարժել ձեռքերը, գլուխը և հեռակառավարվում էր ձայնային ազդանշանով[43]։ Eric-ը և իր «եղբայր» George-ը շրջել են ամբողջ աշխարհը[44]։
1926 թվականին «Westinghouse» էլեկտրոնային կորպորացիան պատրաստեց Televox-ը, այն իրենից ներկայացնում էր ստվարաթղթե կտրվածք՝ միացված տարբեր սարքերի, որոնք օգտագործողը կարող էր անջատել կամ միացնել։ 1939 թվականին «Electro» անունով հումանոիդ ռոբոտը դեբյուտ ունեցավ Նյու Յորքի համաշխարհային ցուցահանդեսում[45][46]։ Այն ուներ 2․1 մետր հասակ և 120․2 կգ զանգված, կարող էր քայլել և ղեկավարվել ձայնային հրամաններով, խոսքում օգտագործել մոտ 700 բառ (կիրառելով 78 պտ/ր հաճախությամբ ձայնարկիչ), սիգարետ ծխել, փուչիկ փչել և շարժել ձեռքերն ու գլուխը։ Մարմինը կազմված էր պողպատյա ատամնանվից, բռունցքային մեխանիզմից և կմախքից՝ պատված ալյումինե թաղանթով։ Ճապոնական առաջին ռոբոտը՝ Gakutensoku-ն, նախագծել և պատրաստել է կենսաբան Մակոտո Նիշիմուրան։
Ժամանակակից ավտոնոմ ռոբոտներ
[խմբագրել | խմբագրել կոդը]Առաջին բարդ վարքագծով էլեկտրոնային ավտոնոմ ռոբոտները պատրաստել է Վիլյամ Գրեյ Վոլտերը Բուրդենի նեյրոլոգիական ինստիտուտում (Բրստոլ, Անգլիա, 1948 և 1949 թվականներին)։ Նա ուզում էր ապացուցել, որ ուղեղի փոքր բջիջների միջև բազմաթիվ կապերը կարող են հանգեցնել շատ բարդ վարքագծի և թե ինչպես է աշխատում ուղեղը, կախված է նրանից, թե ինչպես է այն միացված։ Նրա առաջին ռոբոտներ Elmer-ը and Elsie-ն նախագծվել են 1948-ից 1949 թվականներին և հաճախ նկարագրվել են որպես կրիաներ՝ շնորհիվ իրենց տեսքի և շարժման փոքր արագության։ Եռանիվ ռոբոտ-կրիաները ֆոտոտաքսիս էին, որի շնորհիվ դրանք կարող էին գտնել դեպի հոսանքի աղբյուր ճանապարհը, երբ մարտկոցներն արդեն կարիք ունեին լիցքավորման։
Վոլտերն ընդգծում էր միայն անալոգային էլեկտրոնիկայի կիրառման կարևորությունը ուղեղում ընթացող պրոցեսների մոդելավորման ժամանակ, մինչդեռ նրա ժամանակակիցներ Ալան Թյուրինգը և Ջոն ֆոն Նեյմանը կողմնակից էին հոգեբանական պրոցեսների նկարագրման թվային մեթոդներին։ Նրա աշխատանքը ներշնչեց ռոբոտատեխնիկայի հետազոտողների ապագա սերունդներին, ինչպիսին են Ռոդնի Բրուքսը, Հանս Մորավեցը և Մարկ Թիլդենը։ Վոլտերի կրիաների ժամանակակից մարմնացումներ կարելի է հանդիպել BEAM ռոբոտատեխնիկայում[47]։
Առաջին թվային կառավարմամբ և ծրագրավորվող ռոբոտը ստեղծել է Ջորջ Դեվոլը 1954 թվականին և անվանվեց Unimate։ Այն հիմք հանդիսացավ ժամանակակից ռոբոտատեխնիկայի համար[48]։ Դեվոլը առաջին Unimate-ը 1960 թվականին վաճառեց General Motors-ին, որն այն օգտագործեց բարձրացնելու համար մետաղի տաք ձուլակտորներ Inland Fisher Guide Plant ընկերությունում (արևմտյան Տրենտոն, Էվինգ ավան, Նյու Ջերսի)[49]։ Դեվոլը ստացավ թվային կառավարմամբ ծրագրավորվող ռոբոտ-ձեռքի առաջին արտոնագիրը[50]։
Առաջին փաթեթավորող ռոբոտը ներկայացրեց Fuji Yusoki Kogyo ընկերությունը 1963 թվականին[51]։ 1973 թվականին Գերմանիայում պատենտավորվեց 6 էլեկտրամեխանիկական շարժաբերներով կառավարվող KUKA ռոբոտը[52][53][54]։ Իսկ ծրագրավորվող համապիտանի մանիպուլյատորը ստեղծեց Վիկտոր Շայնմանը 1976 թվականին, որի դիզայնը վաճառվեց Unimation-ին։
Կոմերցիոն և արդյունաբերական ռոբոտները լայն կիրառություն ունեն՝ կատարելով միևնույն աշխատանքն ավելի էժան, ճշգրիտ և հուսալի, քան մարդիկ։ Նրանք օգտագործվում են նաև այն աշխատանքների համար, որոնք հակահիգենիկ են, վտանգավոր կամ ձանձրալի։ Ռոբոտները լայնորեն կիրառվում են արտադրությունում, հավաքման և փաթեթավորման աշխատանքներում, Երկրի և տիեզերքի հետազոտություններում, վիրաբուժությունում, ռազմական բնագավառում, լաբորատոր հետազոտություններում, սպառողական և արդյունաբերական ապրանքների զանգվածային արտադրությունում[55]։
Ապագա զարգացումը և միտումները
[խմբագրել | խմբագրել կոդը]| Atlas, նոր սերունդ | |
Տարբեր մեթոդներ ի հայտ եկան զարգացնելու ռոբոտների վերաբերյալ գիտությունը։ Մեթոդներից մեկը էվոլյուցիոն ռոբոտատեխնիկան է, որտեղ ռոբոտների մեծ մասը փորձարկվում են։ Այն ռոբոտները, որոնք ավելի լավ են աշխատում, ընտրվում են որպես մոդել ռոբոտների մյուս սերնդի ստեղծման համար։ Մյուսը մեթոդը զարգացման ռոբոտատեխնիկան է, որը հետևում է մեկ ռոբոտի շրջանակներում փոփոխությունները և զարգացումը խնդիրների լուծման և այլ ֆունկցիաների ապահովման գործում։ Վերջերս ի հայտ եկավ ռոբոտի նոր տեսակ (RoboHon)[56], որն աշխատում է և որպես սմարտֆոն և որպես ռոբոտ։
Քանի որ ռոբոտները գնալով զարգանում են, կարող է գոյություն ունենալ համակարգչային ստանդարտ օպերացիոն համակարգ, նախատեսված միայն ռոբոտների համար։ Ռոբոտների օպերացիոն համակարգը (ROS) բաց կոդով ծրագրերի փաթեթ է, մշակված Սթենֆորդի համալսարանում, Մասաչուսետսի տեխնոլոգիական ինստիտուտում, Մյունխենի տեխնիկական համալսարանում և այլուր։ ROS-ն ապահովում է ռոբոտի նավիգացիայի և վերջույթների ծրագրավորման մեթոդներ՝ անկախ կոնկրետ օգտագործվող սարքավորումից։ Այն ապահովում է նաև բարձր մակարդակի հրամաններ, նկարների ճանաչման կամ դռների բացման համար։ Երբ ROS-ը տեղադրվում է ռոբոտի համակարգչում, այն ստանում է ռոբոտների վերջույթների երկարության և արագության վերաբերյալ տվյալներ, որոնք կարող են հաղորդվել ավելի բարձր ալգորիթմներին։ Մայքրոսոֆթը նույնպես մշակում է «Windows ռոբոտների համար» համակարգը իր ռոբոտատեխնիկայի զարգացման ստուդիայում (Robotics Developer Studio), որը հասանելի է 2007 թվականից[57]։
Ճապոնիան հույս ունի ունենալ լայնածավալ սպասարկման ռոբոտների առևտրայնացում մինչև 2025 թվականը։ Շատ տեխնոլոգիական հետազոտություններ ճապոնիայում գլխավորում են ճապոնական պետական գործակալությունները, մասնավորապես առևտրի նախարարությունը[58]։
Ռոբոտների շատ կիրառություններ ակնհայտ են թվում մարդկանց, չնայած որ նրանք շատ անգամ գերագնահատում են կանխատեսման պահին ռոբոտների հնարավորությունները[59][60]։ Դեռևս 1982 թվականին մարդիկ համոզված էին, որ երբևէ գոյություն կունենան ռոբոտներ[61], որոնք կներկեն մեքենաները՝ առանց մարդու միջամտության, կդասավորեն իրերը արկղերում, օրինակ՝ շոկոլադները քաղցրավենիքի արկղերում, կպատրաստեն էլեկտրական մալուխային խրձեր, կմշակեն փափուկ ապրանքները, ինչպիսին են շորերը և կոշիկները, կխուզեն ոչխարներին, կծառայեն որպես պրոթեզ, կօգնեն մարդկանց տնային գործերում, կպատրաստեն ուտելիք և կաշխատեն սպասարկման այլ ոլորտներում։
Որպես կանոն այդ կանխատեսումները ժամանակային առումով չափից դուրս լավատեսական են։
Նոր ֆունկցիաներ և նախատիպեր
[խմբագրել | խմբագրել կոդը]2008 թվականին Caterpillar կորպորացիան մշակեց ինքնաթափ, որը կարող է կառավարվել առանց մարդ-օպերատորի[62]։ Շատ վերլուծաբաններ կարծում են, որ ինքնավար բեռնատարները ի վերջո կարող են հեղափոխել լոգիստիկան[63]։ Արդեն 2014 թվականին Caterpillar-ն ուներ ինքնավար ինքնաթափ, որն ինչպես սպասվում էր նշանակալիորեն փոփոխեց հանքարդյունաբերության գործընթացը։ Այդ բեռնատարները 2015 թվականին ակտիվորեն կիրառեց Rio Tinto Coal[64][65][66][67] ընկերությունը Ավստրալիայի լեռնաարդյունաբերությունում։ Որոշ վերլուծաբաններ հավատում են, որ մոտակա մի քանի տասնամյակների ընթացքում բեռնատար ավտոմեքենաների մեծ մասը կլինեն ինքնավար[68]։
«Marge» անունով գրագետ կամ կարդացող ռոբոտն օժտված է ինտելեկտով, որն ապահովում է համակարգչային ծրագրավորումը։ Նա կարող է կարդալ թերթեր, գտնել և ուղղել բառերի սխալներ, սովորել բանկերի մասին, օրինակ՝ Barclays-ի, հասկանալ, որ որոշ ռեստորաններ ավելի լավնեն քան մյուսները և այլն[69]։
2012 թվականին ներկայացվեց նոր ռոբոտ՝ Baxter-ը, որը կարող է սովորել ըստ ցուցումնրի։ Օգտագործողը կարող է սովորեցնել Baxter-ին կատարել գործողությունը, շարժելով ձեռքերը ցանկալի ուղղությամբ և այնուհետև հիշել դա։ Baxter-ի ձեռքի լրացուցիչ ստեղները, կոճակները և կառավարման տարրերն ապահովում են շարժումների ավելի մեծ ճշտությունը և ֆունկցիոնալությունը։ Յուրաքանչյուր սովորական աշխատակից կարող է ծրագրավորել այդ ռոբոտը ընդամենը մի քանի րոպեում, առանց ծրագրավորման ինժեների օգնության, ի տարբերություն սովորական արդյունաբերական ռոբոտների, որոնց օգտագործման համար կարիք կա ընդարձակ ծրագրային ապահովման և կոդավորման։ Սա նշանակում է նաև, որ Baxter-ը կարող է սովորել և կատարել միանգամից մի քանի բարդ առաջադրանքներ։ 2015-ին ավելացվեց Sawyer-ի ծրագրային ապահովումը, փոքր բայց ավելի ճշգրիտ գործողություններ կատարելու համար[70]։
Ստուգաբանություն
[խմբագրել | խմբագրել կոդը]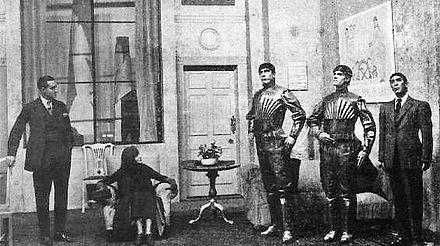
«Ռոբոտ» տերմինն, առաջին անգամ օգտագործել է չեխ գրող Կարել Չապեկը իր «R. U .R. (Rossum's Universal Robots)» (Ռոսումի Ունիվերսալ Ռոբոտները) 1920 թվականին տպագրված պիեսում[71], որը սկսում է գործարանում, պրոտոպլազմային փոխարինող քիմիական նյութով, կենդանի, բայց ավելի պարզ մարդկանց (ռոբոտների) արտադրության տեսարանով։ Պիեսում մանրակրկիտ չի նկարագրվում այդ արարածների ստեղծման տեխնոլոգիան, բայց իրենց արտաքինով դրանք հիշեցնում են ժամանակակից անդրոիդներին։ Այս զանգվածային արտադրության աշխատողները նկարագրվում են որպես արդյունավետ, բայց անզգա, անընդունակ ինքնատիպ մտածողության և անտարբեր ինքնապահպանությանը արարածներ։ Խոսքն այն մասին է, թե ինչպես են շահագործվում ռոբոտները և մարդու կախվածության հետևանքները նրանցից (հատկապես այն բանից հետո, երբ մի խումբ հատուկ մասնագիտացված ռոբոտներ հասնում են գիտակցական բարձր մակարդակի և խրախուսում են աշխարհի բոլոր ռոբոտներին ապստամբելու մարդկանց դեմ)։
Ինքը՝ Կարել Չապեկը չէ բառի հեղինակը։ Նա կարճ նամակ է գրել Օքսֆորդի անգլերեն բառարանի ստուգաբանությունում, որտեղ նա նշել է որպես այդ բառի հեղինակ իր եղբորը՝ նկարիչ և գրող Ժոզեֆ Չապեկին[71]։
1933 թվականին չեխական Lidové noviny ամսագրում տպագրված հոդվածում նա պարզաբանել է, որ իրականում ինքն ուզում էր անվանել այդ արարածներին laboři («աշխատողներ», լատիներեն labor բառից)։ Բայց հետո նրան դուր չեկավ այդ բառը և խորհուրդ հարցրեց եղբորից, ով առաջարկեց «roboti»-ն։
«Robota»-ն բառացի նշանակում է «corvée» կամ «բանվորություն», իսկ ավելի պատկերավոր՝ դաժան աշխատանք (չեխերեն)։ Բառի ավելի ընդհանուր նշանակությունը գրեթե բոլոր սլավոնական լեզուներում (բուլղարերեն, ռուսերեն, սերբերեն սլովակերեն, մակեդոներեն, հին չեխերեն, հունգարերեն) նույնն է՝ «աշխատանք»։ Ավանդաբար «robota»-ն (հունգարերեն՝ robot), գյուղացու տարեկան մոտ 6 ամիս տևող աշխատանքն էր, որ նա պետք է կատարեր իր թագավորի համար։ Բառի սկզբնաղբյուրը հին սլավոնական եկեղեցական (հին բուլղարերեն) rabota-ն է, որը նշանակում է ստրկություն («աշխատանք»՝ ժամանակակից բուլղարերենում և ռուսերենում), որն իր հերթին առաջացել է հնդեվրոպական նախալեզվի «orbh» արմատից։ Ռոբոտը կապված է նաև գերմանարեն Arbeit (աշխատանք) արմատի հետ[72][73]։
«Ռոբոտատեխնիկա» տերմինն առաջարկել է գիտաֆանտաստիկ գրող Այզեկ Ազիմով և օգտագործվում է նկարագրելու ռոբոտների մասին գիտությունը[5]։ Նա ստեղծել է «Ռոբոտատեխնիկայի երեք օրենքները», որոնք անընդհատ կրկնվում են իր գրքերում։ Այնուհետև դրանք օգտագործել են նաև շատ ուրիշները։ «Ռոբոտատեխնիկայի երեք օրենքները» ամբողջովին մտացածին են և ժամանակակից տեխնոլոգիաները թույլ չեն տալիս հասկանալ և կիրառել դրանք։ Իրականում ռոբոտների մեծ մասն ունեն ռազմական կիրառություն, ինչը հակասում է առաջին օրենքին, հաճախ նաև երրորդին։ Ասիմովի օրենքները ցույց էին տալիս, թե ինչպես կարող է չաշխատել պարզ և բարոյական համակարգը։ «Եթե դուք կարդում եք պատմվածքներ, ապա դրանցից յուրաքանչյուրը անհաջողությունների մասին է, ինչը ընդհանրապես պրակտիկ չէ», ասել է Բաֆի համալսարանի դոկտոր Ժոաննա Բրայսոնը[74]։
Ժամանակակից ռոբոտներ
[խմբագրել | խմբագրել կոդը]
Շարժական ռոբոտ
[խմբագրել | խմբագրել կոդը]Հիմնական հոդվածներն են․ շարժական ռոբոտ և ավտոմատ կառավարմամբ տրանսպորտային միջոց։
Շարժական ռոբոտները[75] կարող են ազատորեն տեղաշարժվել իրենց միջավայրում։ Այժմ լայն տարածում գտած շարժական ռոբոտի օրինակ է ավտոմատ կառավարմամբ տրանսպորտային միջոցը (AGV): Այն հետևում է հատակի գծանիշերին կամ հաղորդալարերին և կիրառում է տեսախցիկներ կամ լազերներ։ AGV-ներն այս հոդվածում քննարկված են ավելի ուշ։
Շարժական ռոբոտները տարածված են նաև արդյունաբերությունում, ռազմական և անվտանգության բնագավառներում[76]։ Դրանք նաև հանդիպում են որպես սպառողական ապրանքներ, նախատեսված զվարճանքի կամ կատարելու որոշակի գործողություններ, օրինակ՝ վակուումային մաքրումը։ Շարժական ռոբոտները գտնվում են մեծ քանակությամբ ընթացիկ հետազոտությունների ուշադրության կենտրոնում և գրեթե յուրաքանչյուր մեծ համալսարան ունի դրանց հետազոտությամբ զբաղվող մեկ կամ մի քանի լաբորատորիա։
Շարժական ռոբոտները սովորաբար օգտագործվում են դժվարությամբ կառավարվող միջավայրերում, ինչպիսին են հավաքման հոսքագծերը, որոնք բարդություններ ունեն կապված անսպասելի խափանումներին արձագանքման հետ։ Այդ պատճառով շատ մարդիկ հազվադեպ են հանդիպում նման ռոբոտների։ Այնուամենայնիվ մաքրող և տեխնիկական սպասարկման տնային ռոբոտները զարգացած երկրներում գնալով ավելի հաճախ են հանդիպում։ Ռոբոտների կիրառություններ կարելի է հանդիպել նաև ռազմական բնագավառում։
Արդյունաբերական ռոբոտներ (մանիպուլյացիա)
[խմբագրել | խմբագրել կոդը]Հիմնական հոդվածներն են` արդյունաբերական ռոբոտ և մանիպուլյատոր (սարք)
Արդյունաբերական ռոբոտները կազմված են հոդակապավոր մեխանիզմից (բազմօղակ մանիպուլյատոր) և ծայրոցից։ Ծայրոցի առավել շատ տարածված տարբերակը բռնիչն է։
Ստանդարտների միջազգային կազմակերպությունը տվել է արդյունաբերական ռոբոտ-մանիպուլյատորի սահմանումը ISO 8373 ստանդարտով․
«Ավտոմատ կառավարվող, վերածրագրավորվող, բազմանշանակային, երեք կամ ավելի անշարժ կամ շարժական առանցքներով շարժումների ծրագրավորման հնարավորությամբ մանիպուլյատոր»։ Շարժական առանցքներով մանիպուլյատորները հիմնականում կիրառվում են արդյունաբերության ավտոմատացման նպատակով։
Այս սահմանումն օգտագործել են ռոբոտատեխնիկայի միջազգային ֆեդերացիան, ռոբոտատեխնիկայի եվրոպական հետազոտությունների ցանցը (EURON) և շատ ազգային ստանդարտների կոմիտեներ։
Սպասարկող ռոբոտ
[խմբագրել | խմբագրել կոդը]Հիմնական հոդվածը՝ սպասարկող ռոբոտ
Հաճախ հանդիպող արդյունաբերական ռոբոտներ են ֆիքսված ռոբոտիզացված ձեռքերը և մանիպուլյատորները, որոնք հիմնականում օգտագործվում են ապրանքների արտադրության և բաշխման համար։ «Սպասակող ռոբոտ» տերմինը հստակ սահմանված չէ։ Ռոբոտատեխնիկայի միջազգային ֆեդերացիան առաջարկել է նախնական սահմանում․ սպասարկող ռոբոտը այն ռոբոտն է, որն աշխատում է լրիվ կամ կիսաավտոմատ, կատարելու մարդկանց և սարքավորումներին օգտակար գործողություններ (բացառությամբ արտադրական օպերացիաների), այլ կերպ ասած մատուցում է ծառայություններ։
Ռոբոտ-ուսուցիչ
[խմբագրել | խմբագրել կոդը]Հիմնական հոդվածը՝ ուսումնական ռոբոտատեխնիկա
Ռոբոտներն օգտագործվում են նաև որպես ուսուցիչների օգնականներ։ 1980 ական թվականներից այնպիսի ռոբոտներ ինչպիսին են կրիաները օգտագործվել են դպրոցներում և ծրագրավորվել են Լոգո ծրագրավորման լեզվով։
Գոյություն ունեն ռոբոտների հավաքածուներ, օրինակ ROBOTIS ընկերության Lego Mindstorms, BIOLOID, OLLO կամ BotBrain ուսումնական ռոբոտներ, որոնք կարող են օգնել երեխաներին սովորել մաթեմատիկա, ֆիզիկա, ծրագրավորում և էլեկտրոնիկա։ Ռոբոտները FIRST (գիտության և տեխնիկայի ճանաչման և դրանցով ոգեշնչման համար) ընկերության կողմից ներդրվել են նաև նախնական և միջնակարգ դպրոցներում՝ կազմակերպելով ռոբոտների մրցույթներ։ Այս կազմակերպությունը FIRST Robotics Competition, FIRST LEGO League և FIRST Tech Challenge մրցույթների հիմքն է։
Եղել են նաև ռոբոտանման սարքեր, ինչպիսին են Մայքլ Ջ․ Ֆրիմանի ուսուցանող համակարգիչներ Leachim (1974)-ը և 2-XL (1976)-ը, որոնք Ստերեո 8 մագնիտոֆոնի վրա հիմնված խաղալիքներ էին։
Մոդուլային ռոբոտ
[խմբագրել | խմբագրել կոդը]Հիմնական հոդվածը ինքնակարգավորվող մոդուլային ռոբոտ
Մոդուլային ռոբոտները ռոբոտների նոր տեսակ են, որոնք նախագծված են մեծացնելու ռոբոտների կիրառությունը դրանց կառուցվածքի մոդուլայնացման ճանապարհով։ Մադուլային ռոբոտի ֆունկցիոնալությունը և արդյունավետությունը ավելի հեշտ է մեծացնելը քան սովորական ռոբոտինը։ Այս ռոբոտները կազմված են միատեսակ, մի քանի տարբեր մոդուլներից կամ միաձև մոդուլներից, որոնք տարբերվում են չափերով։ Դրանց կառուցվածքը ապահովում է ազատության աստիճանների հիպերհավելուրդայնություն, քանի որ կարող են նախագծվել 8-ից ավելի ազատության աստիճաններով։ Մոդուլային ռոբոտների ծրագրավորման, հետադարձ կինեմատիկայի և դինամիկայի խնդիրների լուծումը ավելի բարդ է, քան ավանդական ռոբոտների դեպքում։ Մոդուլային ռոբոտները կարող են կազմված լինել L –աձև, խորանարդաձև, U-աձև և H-աձև մոդուլներից։ Robotics Design Inc ընկերության պատենտավորած մոդուլային ռոբոտների ANAT տեխնոլոգիան թույլ է տալիս ստեղծել U և H-աձև մոդուլային ռոբոտներ, որոնք միացված են շղթայով և օգտագործվում են ձևավորելու հետերոգեն և հոմոգեն մոդուլային ռոբոտների համակարգեր։ Այս ANAT ռոբոտները կարող են նախագծվել n ազատության աստիճանով, քանի որ յուրաքանչյուր մոդուլը իրենից ներկայացնում է լիովին ավտոմատացված ռոբոտատեխնիկական համակարգ, որն իրեն նախորդող և հաջորդող մոդուլների նկատմամբ կատարում է հարաբերական շարժում և հետևաբար մի մոդուլը ապահովում է ազատության մեկ աստիճան։ Ինչքան շատ մոդուլներ ամրացված լինեն մեկը մյուսին այնքան շատ ազատության աստիճաններ այն կունենա։ L-աձև մոդուլները կարող են նաև նախագծվել շղթայի տեսքով և պետք է գնալով փոքրանան շղթայի չափերի մեծացմանը զուգահեռ, քանի որ շղթայի ծայրի օգտակար դիմադրությունը մեծացնում է հիմքից ավելի հեռու գտնվող մոդւլների վրա բեռնվածքը։ H-աձև մոդուլները այդպիսի խնդիրներ չունեն, քանի որ դրանց նախագծումը թույլ է տալիս մոդուլային ռոբոտին բաշխել ճնշումը և հավասարաչափ ազդել այլ միացված մոդուլների վրա, հետևաբար բեռնունակությունը չի նվազում կախված լծակի երկարության մեծացումից։ Մոդուլային ռոբոտները կարող են կարգավորվել ձեռքով կամ ինքնուրույն և ձևավորել մեկ այլ ռոբոտ, որը կակատարի այլ գործողություններ։ Քանի որ միևնույն կառուցվածքով մոդուլային ռոբոտները կազմված են մոդուլներից, որոնք իրենց հերթին կազմում են տարբեր մոդուլային ռոբոտներ, մի օձ-ռոբոտը կարող է միավորվել մյուսին և կազմել երկու կամ չորս լծակներով ռոբոտ կամ բաժանվել մի քանի շարժունակ ռոբոտների, որոնք էլ կարող են բաժանվել բազմաթիվ ավելի փոքրերի կամ միավորվել և այլն։ Սա թույլ է տալիս մեկ մոդուլային ռոբոտին լիովին մասնագիտանալու ինչպես մեկ այնպես էլ բազմաթիվ գործողություններ կատարելու համար։
Մոդուլային ռոբոտատեխնիկայի տեխնոլոգիան այժմ կիրառվում է հիբրիդային տրանսպորտներում, արդյունաբերական ավտոմատացումում, ջրանցքների մաքրման և մշակման աշխատանքներում։ Շատ հետազոտական կենտրոններ և համալսարաններ նույնպես ուսումնասիրում են այս տեխնոլոգիան և մշակել են նախատիպեր։
Համագործակցող ռոբոտներ
[խմբագրել | խմբագրել կոդը]Համագործակցող ռոբոտը կամ կոբոտը այն ռոբոտն է, որը կարող է պարզ արդյունաբերական առաջադրանքներ կատարելու ընթացքում անվտանգ և արդյունավետ կերպով փոխազդել մարդ-աշխատողների հետ։ Այնուամենայնիվ արտաքին ուժերը և միջավայրի այլ պայմանները կարող են առաջացնել վտանգներ և ռոբոտների շարժման կառավարման խնդիրներում պետք է հաշվի առնել ռիսկերը։
Արդյունաբերությունում կիրառվող ժամանակակից համագործակցող ռոբոտների մեծ մասը արտադրվում է Դանիայում, Universal Robots ընկերության կողմից։
Ռոդնի Բրուքսի հիմնադրած Rethink Robotics-ը iRobot-ի հետ միասին 2012 թվականի սեպտեմբերին ներկայացրեց արդյունաբերական ռոբոտ Baxter-ը, նախագծված մարդկանց հետ անվտանգ աշխատելու և ծրագրավորված պարզ առաջադրանքներ կատարելու համար։ Baxter-ն ունի հիանալի անջատիչներ, որոնց շնորհիվ կանգ է առնում, երբ իր ձեռքերի շարժման ճանապարհին մարդ է հայտնվում։ Դրանք նախատեսված են վաճառվելու փոքր բիզնեսին և ներկայացվում են որպես անձնական համակարգչի նմանակ։ 2014 թվականի մայիսի դրությամբ Միացյալ Նահանգների 190 ընկերություններ գնել էին Baxter-ներ և արդեն օգտագործվում էին Մեծ Բրիտանիայում կոմերցիոն նպատակներով։
Ռոբոտները հասարակության մեջ
[խմբագրել | խմբագրել կոդը]Աշխարհում գոյություն ունեցող բոլոր ռոբոտների մոտ կեսը գտնվում է Ասիայում, 32%-ը՝ Եվրոպայում, 16%-ը՝ Հյուսիսային Ամերիկայում, 1%-ը Ավստրալիայում և 1%-ը Աֆրիկայում։ Ամենաշատ ռոբոտներ ունեցող երկիրը Ճապոնիան է (40%)։
Ինքնավարություն և էթիկայի հարցեր
[խմբագրել | խմբագրել կոդը]Հիմնական հոդվածներ, Ռոբոէթիկա և արհեստական բանականության էթիկա
Քանի որ ռոբոտները դարձել են ավելի կատարյալ և բարդ, գիտնականները և մասնագետները ավելի հաճախ են անդրադառնում ռոբոտների վարքագիծը կառավարող էթիկայի հարցերին և արդյոք ռոբոտները կարող են հավակնել որևէ սոցիալական, մշակութային, էթիկական կամ օրինական իրավունքների։ Գիտնականների մի խումբ հայտատարել էր, որ ռոբոտի համար նախատեսված ուղեղ կարող է գոյություն ունենալ արդեն 2019 թվականին։ Մյուսները կանխատեսում են ռոբոտների ինտելեկտի հեղափոխական զարգացում մինչև 2050 թվականը։ Վերջին ձեռքբերումները ռոբոտների վարքը ավելի բարդ են դարձրել։ Խելացի ռոբոտների սոցիալական ազդեցությունը նյութ է հանդիսացել 2010 թվականին նկարահանված Plug & Pray վավերագրական ֆիլմի համար։
Վերնոր Վինգեն ենթադրել է, որ կարող է գալ ժամանակ, երբ համակարգիչներն ու ռոբոտները մարդկանցից ավելի խելացի կլինեն և դա անվանեց «սինգուլյարություն», որը հնարավոր է շատ վտանգավոր լինել մարդկանց համար։ Այն ուսումնասիրում է Սինգուլարիտարիանիզմ կոչվող փիլիսոփայությունը։
2009 թվականին այս ոլորտի մասնագետները մասնակցել են արհեստական ինտելեկտի զարգացման ասոցացիայի (AAAI) կազմակերպած կոնֆերենցիային և քննարկել թե արդյոք համակարգիչներն ու ռոբոտները կարող են ձեռք բերել որոշակի ինքնուրույնություն և ինչքանով դա վտանգավոր կլինի։ Նրանք նշել են, որ որոշ ռոբոտներ արդեն կիսաավտոնոմ են, օրինակ կարող են ինքնուրույն փնտրել և գտնել հոսանքի աղբյուր, ընտրել զենքով հարձակման համար թիրախ և այլն։ Նրանք նշեցին նաև, որ որոշ համակարգչային վիրուսներ կարող են խուսափել ոչնչացումից և ունենալ «ուտիճի ինտելեկտ»։ Գիտաֆանտաստիկ գրականությունում նկարագրված ինքնագիտակցությունը քիչ հավանական է, բայց կարող են լինել այլ թաքնված վտանգներ։ Տարբեր մեդիա աղբյուրներ և գիտական խմբեր նշել են առանձին բնագավառներում տարբեր տենդենցներ, որոնք միասին կարող են բերել ռոբոտների ֆունկցիոնալության և ինքնուրույնության մեծացման և հետևաբար առաջացնել խնդիրներ։ 2015 թվականին թվականին Nao alderen ռոբոտները ցույց տվեցին որոշ աստիճանի ինքնագիտակցություն։ Նյու Յորքի Ռենսելերի անվան պոլիտեխնիկական ինստիտուտի արհեստական ինտելեկտի (AI) և հետազոտությունների լաբորատորիայի (Reasoning Lab) հետազոտողները անցկացրեցին փորձարկում, որտեղ ռոբոտը գիտակցեց իրեն տրված հարցի էությունը և ուղղեց իր սխալ պատասխանը։
Ռազմական ռոբոտներ
[խմբագրել | խմբագրել կոդը]Որոշ մասնագետներ և գիտնականներ կասկածի տակ են առնում ռոբոտների մասնակցությունը ռազմական գործողոթյուններում, հատկապես այն դեպքում, երբ այդ ռոբոտներն ունենան որոշակի ինքնուրույնություն։ Կան նաև մտահոգություններ այն տեխնոլոգիայի հետ կապված, որը թույլ կտա զինված ռոբոտներին կառավարվել այլ ռոբոտների կողմից։ Ամերիկյան ռազմածովային ուժերը ներկայացրել են զեկույց, որտեղ ասվում է, որ կապված ռազմական ռոբոտների կատարելագործման հետ, պետք է մեծ ուշադրություն դարձնել դրանց ինքոնուրույն որոշումներ կայացնելու հետևանքների վրա։ Մի հետազատող պնդում է, որ ավտոնոմ ռոբոտները կարող են ավելի մարդկային լինել, քանի որ նրանք կարող են կայացնել ավելի արդյունավետ որոշումներ։ Բայց շատ հետազոտողներ դրան չեն հավատում։
Մասնավորապես EATR ռոբոտը հասարակությունում մտահոգություն է առաջացրել կապված իր էներգիայի աղբյուրի հետ, քանի որ այն կարող է անընդհատ լիցքավորել իրեն, օգտագործելով օրգանական նյութեր։ Չնայած EATR-ի շարժիչը նախատեսված է իր տվիչների կողմից հատուկ ընտրված բիոզանգվածի և բանջարեղենի համար, որոնք նա կարող է գտնել մարտադաշտում կամ այլ հատուկ միջավայրերում, պրոյեկտը հայտարարեց, որ այն կարող է օգտագործել նաև հավի ճարպը։
Մանուել դը Լանդան նշել է, որ արհեստական ընկալմամբ օժտված «խելացի հրթիռները» և ավտոնոմ ռումբերը նույնպես կարող են համարվել ռոբոտներ, քանի որ դրանք իրենց որոշումների մի մասը ինքնուրույն են կայացնում։ Նա կարծում է, որ կարևոր որոշումների կայացման իրավունքի փոխանցումը մեքենաներին շատ վտանգավոր միտում ունի։
Գործազրկության հետ ունեցած առնչությունը
[խմբագրել | խմբագրել կոդը]Հիմնական հոդվածը․ տեխնոլոգիական գործազրկություն
Դարեր շարունակ մարդիկ կանխատեսել են, որ մեքենաները կդարձնեն մարդկային աշխատուժը անմրցունակ և կավելացնեն գործազրկությունը, չնայած դրան գործազրկության հիմնական պատճառ միշտ համարվել է պետության սոցիալական քաղաքականությունը։
Մարդկային աշխատուժի փոխարինման թարմ օրինակ է Foxconn թայվանական տեխնոլոգիական ընկերությունը, որը 2011 թվականի հուլիսին հայտարարեց իր աշխատողներին ռոբոտներով փոխարինելու 3 ամյա պլանի մասին։ Ներկայումս ընկերությունը օգտագործում է 10000 ռոբոտ, բայց 3 տարվա ընթացքում նախատեսվում է, որ կդարձնի մինչև 1 միլիոն։
Իրավաբանները ենթադրում են, որ աշխատավայրում ռոբոտների թվի աճը կբերի աշխատողների վերաբերյալ օրենքների փոփոխման անհրաժեշտության։
Քեվին Ջ․ Դելանին ասել է՝ ռոբոտները մարդկանցից խլում են աշխատանքը։ Բայց Բիլ Գեյթսը կարծում է, որ կառավարությունները պետք է օգտագործեն հարկային ընկերությունները, որ գոնե ժամանակավոր դանդաղեցվի ավտոմատացման տարածումը և ֆինանսավորեն այլ տեսակի աշխատատեղեր։ Ռոբոտների հարկը կօգնի ապահովել փոխարինված աշխատողների կենսաթոշակը։
Ժամանակակից կիրառություններ
[խմբագրել | խմբագրել կոդը]Տես նաև։ Ռոբոտների ցանկ
Կախված իրենց կիրառություններից գոյություն ունեն երկու հիմնական տեսակի ռոբոտներ․ ընդհանուր նշանակության ավտոնոմ ռոբոտներ և մասնագիտացված ռոբոտներ։
Ռոբոտները կարող են դասակարգվել ըստ իրենց նշանակության։ Ռոբոտը կարող է նախագծվել գերազանց իրականացնելու մի որոշակի առաջադրանք կամ մի քանիսը՝ ոչ այնքան լավ։ Տեսականորեն բոլոր ռոբոտները կարող են վերածրագրավորվել այլ գործողության համար, բայց որոշները սահմանափակված են իրենց ֆիզիկական ձևով։ Օրինակ գործարանային ռոբոտ-ձեռքը կարող է կատարել կտրման, զոդման, սոսնձման աշխատանքներ, մինչդեռ հավաքիչ ռոբոտը կարող է միայն տեղադրել մեկուսատախտակները։
Ընդհանուր նշանակության ավտոնոմ ռոբոտներ
[խմբագրել | խմբագրել կոդը]Հիմնական հոդված․ Ավտոնոմ ռոբոտ
Ընդհանուր նշանակության ավտոնոմ ռոբոտները կարող են կատարել իրարից անկախ տարբեր գործողություններ, ինքնուրույն տեղաշարժվել հայտնի տեղանքներում, հոգալ իրենց լիցքավորման մասին, փոխազդել էլեկտրոնային դռների, լիֆտերի և իրականացնել այլ հիմնական առաջադրանքներ։ Համակարգիչների նման ընդհանուր նշանակության ռոբոտները կարող են կապ հաստատել ցանցերի, ծրագրային ապահովման և ակսեսուարների հետ, ինչը մեծացնում է դրանց օգտակարությունը։ Դրանք կարող են ճանաչել մարդկանց և օբյեկտները, խոսել, շփվել, վերլուծել շրջակա միջավայրի որակը, արձագանքել ահազանգերին, ընտրել անհրաժեշտ նյութեր և այլն։ Կարող են նաև կատարել տարբեր գործողությունները միաժամանակ կամ դրանք պլանավորել օրվա տարբեր ժամերին։ Այդպիսի որոշ ռոբոտներ փորձում են կրկնօրինակել մարդկանց գործողությունները և արտաքինը և կոչվում են մարդանման կամ հումանոիդ։ Այդ ռոբոտները դեռևս գտնվում են շատ սահմանափակ մակարդակում։ Դեռևս չկան ռոբոտներ, որոնք կարող են ակտիվ կողմնորոշվել մի վայրում, որտեղ չեն եղել։ Այս կերպ, չնայած իրենց լավ հայտնի միջավայրում դրսևորած բավականին խելացի վարքին, հումանոիդ ռոբոտները դեռևս շատ սահմանափակ են։
Գործարանային ռոբոտներ
[խմբագրել | խմբագրել կոդը]Ավտոմեքենաների արտադրություն
Վերջին երեք տասնամյակում ավտոմեքենաների գործարաններում գերակշռում են ռոբոտները։ Գործարանները սովորաբար պարունակում են լիովին ավտոմատացված հոսքագծերում աշխատող հարյուրավոր արդյունաբերական ռոբոտներ, այնպես որ յուրաքանչյուր տաս աշխատողին բաժին է ընկնում մեկ ռոբոտ։ Ավտոմատ հոսքագծի վրա մեքենայի շասսին զոդվում է, սոսնձվում, ներկվում և վերջնական հավաքվում հաջորդող ռոբոտիզացված բաժիններում։
Փաթեթավորում
Արդյունաբերական ռոբոտները լայնորեն կիրառվում են ապրանքների փաթեթավորման գործում։ Օրինակ խմիչքի արկղները կոնվեյերից վերցնելու և արկղներում արագ դասավորելու համար կամ մեքենաները բեռնավորելու և բեռնաթափելու համար։
Էլեկտրոնիկա
Զանգվածային արտադրության էլեկտրոնային պլատաները բացառապես արտադվում են հավաքման ռոբոտներով, հիմնականում SCARA մանիպուլյատորներով, որոնք վերցնում են շատ փոքր էլեկտրոնային կոմպոնենտները և մեծ ճշտությամբ տեղադրում պլատայի վրա։ Այդպիսի ռոբոտները կարող են տեղադրել ժամում հարյուր հազարավոր կոմպոնենտներ, գերազանցելով մարդուն արագության, ճշգրտության և հուսալիության հատկանիշներով։
Ավտոմատ ղեկավարվող տրանսպորտային միջոցներ (AGV)
Մարկերներին կամ հատակի հաղորդալարերին հետևող շարժական ռոբոտները, որոնք կիրառում են տեսողությունը կամ լազերներ, օգտագործվում են տեղափոխելու ապրանքները մեծ շինություններում, օրինակ պահեստներում, նավահանգիստներում կամ հիվանդանոցներում։
Ավելի վաղ AGV տեսակի ռոբոտներ
Սահմանափակված են առաջադրանքներով, որոնք պետք է ճշգրիտ որոշվեն և իրականացվեն ամեն անգամ նույն կերպ։ Պահանջվում է շատ փոքր հետադարձ կապ կամ ինտելեկտ, դրանք կարիք ունեն միայն ամենահիմնական արտաքին ռեցեպտորների (տվիչներ)։ Այս AGV-ների սահմանափակությունն այն է, որ դրանց շարժման ուղիները հեշտությամբ չեն փոխվում և դրանք չեն կարող ինքնուրույն փոխել իրենց ճանապարհը, երբ հանդիպում են խոչնդոտի։ Երբ մի AGV խափանվում է, դա կարող է կանգնեցնել ամբողջ օպերացիան։
Միջանկյալ AGV տեխնոլոգիաներ
Մշակվել է կիրառելու լույսի աղբյուրների կամ շտրիխ կոդերի ցանցերից եռանկյունավորումը հատակի սկանավորման կամ ծածկապատման համար։ Շատ գործարաններում եռանկյունավորման համակարգերը միտում ունեն պահանջելու չափավոր կամ բարձր մակարդակի սպասարկում, օրինակ լույսի աղբյուրների կամ շտրիխ կոդերի ամենօրյա մաքրումը։ Բացի այդ, եթե բարձր պատվանդանը կամ մեծ մեքենան փակում է լույսի աղբյուրները կամ շտրիխ կոդերը վնասվում են, AGV-ները կարող են կանգ առնել։ Այդպիսի AGV-ները նախագծվում են կիրառվելու այն միջավայրերում, որտեղ մարդիկ չեն աշխատում։
Ինտելեկտուալ AGV-ներ (i-AGV)
Դրանցից SmartLoader-ը, SpeciMinder-ը, ADAM-ը, Tug-ը, Eskorta-ն և MT 400-ը Motivity-ի հետ միասին նախագծվել են մարդկանց հարմար աշխատանքային միջավայրերում աշխատելու համար։ Դրանք կողմնորոշվում են ճանաչելով շրջապատի մարմինները։ Եռաչափ սկաներները և միջավայրը ընկալելու այլ երկչափ կամ եռաչափ միջոցները օգնում են խուսափելու ամբողջական սխալներից AGV-ի ընթացիկ դիրքի կոորդինատների որոշման հաշվարկներում։ Որոշ AGV-ներ կարող են ստեղծել իրենց միջավայրի քարտեզը՝ օգտագործելով միաժամանակյա տեղայնացման և քարտեզագրման (SLAM) սկանավորող լազերները և ճանապարհների պլանավորման և խոչնդոտներից խուսափելու ալգորիթմների կիրառմամբ կողմնորոշվել իրական ժամանակում։ Դրանք ի վիճակի են կողմնորոշվել բարդ միջավայրերում և կատարել ոչ պարբերական և ոչ հաջորդական առաջադրանքներ։ Օրինակ կիսահաղորդչային լաբորատորիաներում լուսաքողարկների, հիվանդանոցներում նմուշների և պահեստներում ապրանքների տեղափոխումը։ Դինամիկ միջավայրերում, ինչպիսին են տակդիրներով լի պահեստները, AGV-ները կարիք ունեն լույսի արագության վրա հիմնված և ստերեոտեսախցիկային եռաչափ տվիչների լրացուցիչ ստրատեգիաների։
Կեղտոտ, վտանգավոր, ձանձրալի կամ բարդ աշխատանքներ
[խմբագրել | խմբագրել կոդը]Շատ աշխատանքներ կան, որ մարդիկ նախընտրում են թողնել ռոբոտներին։ Աշխատանքը կարող է լինել ձանձրալի, օրինակ կենցաղային մաքրությունը, կամ վտանգավոր, օրինակ հրաբխի խառնարանի հետազոտությունը։ Կան նաև մարդու համար ֆիզիկապես անհասանելի աշխատանքներ, օրինակ այլ մոլորակի հետազոտությունը, երկար խողովակի մաքրումը կամ լապարոսկոպային վիրահատության իրականացումը։
Տիեզերական զոնդեր
Երբևէ արձակված գրեթե յուրաքանչյուր անօդաչու տիեզերական զոնդ եղել է ռոբոտ։ Չնայած, որ 1960 ական թվականներին արձակվածները շատ սահմանափակ կարողություններ ունեին, բայց դրանց թռչելու և վայրէջք կատարելու ընդունակությունը պահպանում է ռոբոտ կոչվելու իրավունքը (օրինակ Լունա 9 զոնդը)։ Դրանց թվում են նաև Վոյաջեր և Գալիլեո զոնդերը։
Հեռակառավարվող ռոբոտներ
Հեռակառավարվող ռոբոտները սարքեր են, որոնք կառավարվում են որոշակի հեռավորությունից մարդ-օպերատորի կողմից, այլ ոչ թե շարժվում են նախապես ծրագրավորված գործողությունների հաջորդականությամբ, բայց որոնք նաև կիսաավտոմատ են։ Դրանք օգտագործվում են այն միջավայրերում, որտեղ մարդը չի կարող ներկա գտնվել, որովհետև այն վտանգավոր է, հեռու է կամ անհասանելի է։ Ռոբոտը կարող է լինել այլ սենյակում, այլ երկրում կամ օպերատորի համեմատ շատ տարբեր մասշտաբ ունենալ։ Օրինակ լապարոսկոպային վիրահատության ռոբոտը թույլ է տալիս վիրաբույժին խուսափել բաց վիրահատությունից և հետևաբար արագացնել հիվանդի հետվիրահատական վերականգնումը։ Դրանք կարող են օգտագործվել նաև ջրանցքների մաքրման վտանգավոր գործում։ Ռումբերի վնասազերծման համար օպերատորը ուղարկում է ոչ մեծ չափերի ռոբոտ և հեռու ու անվտանգ տարածության վրա կատարում գործողությունը։ Որոշ գրողներ օգտագործում են Longpen կոչվող սարքը գրքերը հեռավորության վրա ստորագրելու համար։ Հեռակառավարվող ռոբոտ-ինքնաթիռները, ինչպիսին է անոօդաչու թռչող սարք Predator-ը, լայնորեն կիրառվում են ռազմական բնագավառում։ Այս անօդաչու դրոնները կարող են ուսումնասիրել տեղանքը և կրակել թիրախներին։ iRobot's Packbot-ի և Foster-Miller TALON-ի նման հարյուրավոր ռոբոտներ ԱՄՆ զինուժը օգտագործում է Իրաքում և Աղվանստանում վնասազերծելու համար ճանապարհներին տեղադրված ռումբերը կամ ինքնաշեն պայթուցիկ սարքերը (IED)՝ «պայթյունավտանգ ռազմամթերքների վերացում» գործողության ընթացքում (EOD)։
Մրգերի հավաքման ավտոմատ մեքենաներ
Այս ռոբոտներն օգտագործվում են այգիներում մրգերի հավաքման գործընթացն ավտոմատացնելու համար, որն ավելի էժան է քան մարդկային աշխատուժը։
Տնային ռոբոտներ
Տնային ռոբոտները պարզ ռոբոտներ են նախատեսված տնային պայմաններում մի որոշակի գործողություն կատարելու համար։ Դրանք հաճախ օգտագործվում են պարզ բայց մարդու համար ոչ ցանկալի աշխատանքներ կատարելու համար, ինչպիսին են փոշեծծումը, հատակի լվացումը և գազոնի հնձումը։ Տնային ռոբոտի օրինակ է Roomba-ն։
Ռազմական ռոբոտներ
[խմբագրել | խմբագրել կոդը]Հիմնական հոդված․ Ռազմական ռոբոտ
Ռազմական ռոբոտ է SWORDS-ը, որը ներկայումս օգտագործվում է ցամաքային մարտերում։ Այն կարող է օգտագործել տարբեր տեսակի զենքեր և քննարկվում է մարտադաշտում նրան տալու ինքնուրույնության որոշակի աստիճան։
Մարտական անօդաչու թռչող սարքերը (UCAV), որոնք UAV-ների վերազինված տարբերակներն են, կարող են իրականացնել ամենաբազմազան առաջադրաներ, այդ թվում՝ մարտական։ UCAV-ների նախագծման օրինակ է BAE Systems Mantis-ը, որը կարող է ինքնուրույն թռչել, ընտրել ուղղությունը և թիրախը և շատ որոշումներ կայացնել ինքնուրույն։ BAE Taranis-ը Մեծ Բրիտանիայում պատրաստված մարտական անօդաչու թռչող սարք է, որը կարող է թռչել մայրցամաքների վրայով և հնարավորություն ունի խուսափել հայտնաբերումից։ Սպասվում է, որ փորձարկումները կսկսվեն 2011 թվականին։
Արհեստական ինտելեկտի զարգացման ասոցացիան (AAAI) մանրամասն ուսումնասիրել է այս թեման և նրա նախագահը պատվիրել է հետազոտություն այս խնդրի լուծման համար։
Որոշ մասնագետներ առաջ են քաշել «բարեկամ արհեստական ինտելեկտի» ստեղծման անհրաժեշտությունը, ինչը նշանակում է, որ արհեստական ինտելեկտի զարգացման ծրագրերը պետք է անպայման ներառեն նաև նրան մարդու բարեկամ դարձնելը։ Հայտնի է, որ նման միջոցառումներ արդեն կատարված են ռոբոտաշինական բնագավառում առաջատար Ճապոնիայում և Հարավային Կորեայում՝ կիրառվել են ռոոտների անվտանգության համակարգեր և օրենքներ, նման Ազիմովի ռոբոտատեխնիկայի հայտնի երեք օրենքներին։ Պաշտոնական հաշվետվությունը հրապարակվել է 2009 թվականին Ճապոնիայի կառավարությանն առընթեր ռոբոտների արտադրության քաղաքականությամբ զբաղվող կոմիտեի կողմից։ Չինացի պաշտոնյաներ և հետազոտողներ հրապարակել են հաշվետվություն, որն առաջարկում է մի շարք էթիկայի կանոններ և նոր իրավական ուղեցույցներ և կոչվում է «ռոբոտների իրավական հետազոտություն»։ Որոշ անհանգստություն կա կապված ակնհայտ սուտ խոսող ռոբոտների ի հայտ գալու հետ։
Լեռնահանքային ռոբոտներ
[խմբագրել | խմբագրել կոդը]Լեռնահանքային ռոբոտները նախատեսված են լուծելու հանքարդյունաբերության առջև ծառացած մի շարք խնդիրներ, ինչպիսին են՝ որակյալ կադրերի պակասը, արտադրողականության ավելացումը հանքաքարում անհրաժեշտ մետաղի պարունակության նվազման դեպքում և էկոլոգիական խնդիրները։ Ի շնորհիվ հանքարդյունաբերությունում աշխատանքի վտանգավորության, հատկապես ստորգետնյա աշխատանքներում, ավտոնոմ, կիսաավտոնոմ և հեռակառավարվող ռոբոտների կիրառությունը վերջին ժամանակներում մեծացել է։ Մի շարք ավտոարտադրողներ առաջարկում են ավտոնոմ գնացքներ, բեռնատարներ, բեռնող սարքեր, որոնք առանց մարդու միջամտության կբեռնեն նյութը, կտեղափոխեն նշանակված վայր և կբեռնաթափեն։ Աշխարհի ամենամեծ հանքարդյունաբերող կորպորացիաներից մեկը՝ Ռիո Տինտոն վերջերս ընդարձակել է իր ավտոպարկը հասցնելով այն 150 Komatsu մակնիշի ավտոնոմ բեռնատարների, որոնք աշխատում են արևմտյան Ավստրալիայում։ Նման կերպ BHP ընկերությունը հայտարարեց աշխարհում իր ամենամեծ հորատող ավտոպարկ ունենալու մասին՝ Atlas Copco մակնիշի 21 ավտոնոմ մեքենաներ։ Այժմ գոյություն ունեն նաև հորատող, թրթուրավոր և քար ջարդող ավտոնոմ ռոբոտներ։ Atlas Copco Rig կառավարման համակարգը թույլ է տալիս ավտոմատ կերպով իրականացնել հորատման պլանը՝ դիրքավորել հորատող սարքավորումը GPS-ի միջոցով, կարգաբերել այն և հորատել ըստ տրված խորության։ Նմանապես Transmin Rocklogic համակարգը թույլ է տալիս ավտոմատ կերպով պլանավորել քար ջարդող մեքենայի ուղին դեպի ընտրված նշանակակետը։ Այս համակարգերը մեծացնում են հանքարդյունահանման պրոցեսի ավտանգությունը և արդյունավետությունը։
Առողջապահություն
[խմբագրել | խմբագրել կոդը]Ռոբոտներն առողջապահությունում ունեն երկու հիմնական ֆունկցիաներ՝ օգնում են որոշ հիվանդություններով տառապող անհատներին (օրինակ՝ բազմակի սկրելոզ) կամ օգտագործվում են ընդհանուր դեղագործական և հիվանդանոցային համակարգերում։
Տնային ավտոմատ սարքեր ծերերի և հաշմանդամների համար
Լրացուցիչ ինֆորմացիա՝ վերականգնողական ռոբոտ
Տնային պայմաններում օգտագործվող ռոբոտները ժամանակի ընթացքում պարզ ռոբոտ-օգնականներից (Handy 1) վերածվելով կիսաավտոմատ ռոբոտների (FRIEND), որոնք կարող են օգնել ծերերին և հաշմանդամներին իրենց հիմնական խնդիրներում։
Բնակաչության ծերացում տեղի է ունենում շատ երկրներում, հատկապես այդ խնդիրը մեծ է Ճապոնիայում։ Դա նշանակում է, որ խնամքի կարիք ունեցող ծերերի թիվը մեծանում է իսկ նրանց խնամող երիտասարդ մարդկանց թիվը նվազում։ Մարդիկ ամենալավ խնամողներն են, բայց նրանք միշտ չէ, որ հասանելի են և աստիճանաբար ներդրվում են ռոբոտները։
FRIEND-ը կիսաավտոմատ ռոբոտ է, որը նախագծված է օժանդակելու հաշմանդամներին և ծերերին իրենց առօրյա կյանքում, օրինակ՝ օգնում են պատրաստել ուտելիք և այլն։ FRIEND-ը թույլ է տալիս ստորին վերջույթների կամ ամբողջ մարմնի պարալիչ և մկանային հիվանդություններ ունեցող հիվանդներին առանց բուժանձնակազմի օգնության հոգալ իրենց առօրյա կարիքները։
Դեղատներ
Հիմնական հոդված։ Ավտոմատացումը դեղատներում
Script Prօ ընկերությունը արտադրում է ռոբոտներ, որոնք օգնում են դեղատներում լրացնելու դեղահաբային նշանակումները։ Դեղագործը մուտքագրում է ռեցեպտը ինֆորմացիոն համակարգ, որը որոշում է ռոբոտի մեջ դեղի առկայությունը, այնուհետև ինֆորմացիան ուղարկում է ռոբոտին լրացնելու համար։ Ռոբոտն ունի երեք տարբեր չափերի տարաներ՝ ըստ դեղահաբի չափերի։ Երբ տարան լցվում է, այն հասցվում է կոնվեյերային ժապավենին, որն էլ իր հերթին փոխանցում է բռնիչին, որը պտտում է տարան և ամրացնում հիվանդի պիտակը։ Այնուհետև այն տեղադրվում է այլ կոնվեյերի վրա, որը տեղափոխում է դեղահաբի տարան LED էկրանի վրա նշված հիվանդի անունով բաժին։ Աշխատակիցը ստուգում է տարայի պարունակությունը, համոզվելու համար դրա համապաստախանությունը հիվանդի դեղատոմսին, կնիքում և տալիս հիվանդին։ Ռոբոտը խնայում է մեծ ժամանակ և շատ անհրաժեշտ է դեղատներում։
Մակքեսոնի RX ռոբոտը բժշկական ռոբոտատեխնիկայի մեկ այլ արտադրանք է, որն օգնում է դեղատներին բաժանել հազարավոր դեղամիջոցներ գրեթե առանց սխալների։ Ռոբոտը կարող է լինել 10 ֆուտ լայնությամբ և 30 ֆուտ երկարությամբ և կարող է կրել հարյուրավոր տարբեր տեսակի դեղամիջոցներ և հազարավոր չափաքանակներ։ Այս կերպ դեղատունը խնայում է շատ ռեսուրսներ, հատկապես փոքրացնում աշխատողների քանակը, որոնք այնքանել շատ չեն սակավ ռեսուրսներով արդյունաբերությունում։ Ռոբոտն օգտագործում է պնևմատիկ համակարգին միացված էլեկտրամեխանիկական գլուխը, որպեսզի վերցնի դեղի ամեն մի չափաքանակը և հասցնի անհրաժեշտ վայր։ Գլուխը շարժվում է միայն մի առանցքով, երբ անհրաժեշտ է պտտվել -ով և վերցնել դեղամիջոցը։ Այս պրոցեսի ընթացքում ռոբոտն օգտագործում է շտրիխ-կոդերի տեխնոլոգիան ստուգելու համար պահանջվող դեղի ընտրությունը։ Այնուհետև դեղն ուղարկում է կոնվեյերային ժապավենի տվյալ հիվանդին համապատասխանող կոնտեյներ։ Այն բանից հետո, երբ կոնտեյները լցվում է տվյալ հիվանդին անհրաժեշտ բոլոր դեղամիջոցներով, բաց է թողնվում և կոնվեյերային ժապավենով վերադարձվում աշխատակցին։
Հետազոտական ռոբոտներ
[խմբագրել | խմբագրել կոդը]Տես նաև։ Ռոբոտատեխնիկական հետազոտություն
Ռոբոտների մեծ մասը արդեն գտնվում են գործարաններում կամ տներում, կատարելով արտադրական կամ փրկարարական աշխատանքներ, իսկ լաբորատորիաներում ակտիվ շարունակվում են նոր տեսակի ռոբոտների մշակումները։ Ռոբոտատեխնիկայի հետազոտությունների մեծ մասը կենտրոնացած են ոչ թե որոշ արտադրական առաջադրանքներ կատարելու համար, այլ նոր տիպի ռոբոտների նախագծման և արտադրման այլընտրանքային մեթոդների մշակման գործում։ Սպասվում է որ այդ նոր տեսակի ռոբոտները ի վիճակի կլինեն լուծելու արդի շատ խնդիրներ, երբ դրանք վերջապես ստեղծվեն։
Բիոնիկական և կենսանմանակող ռոբոտներ
Լրացուցիչ ինֆորմացիա։ Բիոնիկա
Լրացուցիչ ինֆորմացիա։ Կենսանմանակում
Ռոբոտների նախագծման մոտեցումներից մեկը կենդանիների նմանակումն է։ BionicKangaroo-ն մշակվել և նախագծվել է կենգուրույի շարժման ֆիզիոլոգիայի և մեթոդների հետազոտության և կիրառման միջոցով։
Նանոռոբոտներ
Լրացուցիչ ինֆորմացիա։ Նանոռոբոտներ
Նանոռոբոտատեխնիկան ռոբոտների և մեքենաների ստեղծման նոր բնագավառ է, որի բաղկացուցիչ մասերը գտնվում են չափերի նանո տիրույթում ( մ)։ Դրանք հայտնի են նաև «Նանոբոտներ» կամ «նանիտներ» անվանումներով և ստեղծվում են մոլեկուլային մեքենաներով։
Առայժմ հետազոտողները ստեղծել են այդ բարդ համակարգերի հիմնականում որոշ մասերը՝ առանցքակալներ, տվիչներ և սինթետիկ մոլեկուլային շարժիչներ, բայց գործող ռոբոտներ նույնպես հայտնի են, օրինակ Nanobot Robocup մրցույթի մասնակիցները։ Գիտնականները հույս ունեն ստեղծել նաև վիրուսների կամ բակտերիաների նման փոքր ամբողջական ռոբոտներ, համապատասխան փոքր չափերով միջավայրերում աշխատելու համար։ Հնարավոր կիրառություններն են միկրովիրաբուժությունը (բջիջների մակարդակով), օգտակար մառախուղը, արտադրությունը, զինագործությունը և մաքրումը։ Որոշ մարդիկ ենթադրում են, որ եթե այդ ռոբոտները ընդունակ լինեն վերարտադրվելու, ապա երկրագունդը կվերածվի «գորշ լորձ»-ի, մինչդեռ մյուսները պնդում են, որ այդ հիպոթեզային ենթադրությունը անհեթեթություն է։
Վերակոնֆիգուրացվող ռոբոտներ
Հիմանական հոդված։ Ինքնավերակոնֆիգուրացվող մոդուլային ռոբոտ
Որոշ հետազոտողներ հնարավոր են համարել այնպիսի ռոբոտների ստեղծումը, որոնք կարող են փոփոխել իրենց ֆիզիկական ձևը կախված տվյալ առաջադրանքից։ Այդպիսին է երևակայական T-1000-ը։ Իրական ռոբոտները դեռևս այդքան բարդ չեն և հիմնականում կազմված են փոքրաթիվ խորանարդաձև միավորներից, որոնք կարող են շարժվել միմյանց նկատմամբ։ Մշակվել են ալգորիթմներ այն դեպքի համար, երբ այդպիսի ռոբոտները կդառնան իրականություն։
Փափկամարմին ռոբոտներ
Առաձգական ակտուատորներով (պնևմատիկ մկաններ, էլեկտրաակտիվ պոլիմերներ, ֆեռոհեղուկներ) սիլիկոնե ռոբոտները շատ տարբեր են կոշտ կմախքով ռոբոտնեից և կարող են դրսևորել տարբեր վարք։
Խմբակային ռոբոտներ
Հիմնական հոդված։ Խմբակային ռոբոտատեխնիկա
Ոգեշնչվելով միջատների խմբերից (մրջյուններ, մեղուներ և այլն) հետազոտողները մոդելալովորում են հազարավոր փոքր ռոբոտների խմբի վարքը, որոնք միասին կատարում են որևէ օգտակար գործողություն, օրինակ կորած իրի որոնումը, մաքրումը կամ լրտեսությունը։ Մեկ ռոբոտը բավականին պարզ է, բայց խմբի համատեղ վարքը շատ ավելի բարդ է։ Ռոբոտների խումբւ կարելի է դիտարկել մեկ միասնական համակարգ, ինչպես օրինակ մրջյունների սուպերօրգանիզմ համարվող խումբը, որը դրսևորում է խմբային ինտելեկտ։ Ներկայումս ստեղծված ռոբոտների ամենամեծ խմբերն են iRobot-ը, SRI/MobileRobots CentiBots պրոյեկտը և Open-source Micro-robotic-ը, որոնք նախատեսված են ուսումնասիրելու կոլեկտիվ վարքը։ Խմբերը նաև շատ ավելի քիչ են ձախողվում։ Մինչդեռ մեկ խոշոր ռոբոտը կարող է ձախողվել և չկատարել առաջադրանքը, իսկ խումբը կշարունակի աշխատանքը եթե նույնիսկ մի քանի ռոբոտ շարքից դուրս գան։ Այս հատկությունը հատկապես գրավիչ է տիեզերական հետազոտություններում, որտեղ ձախողումը սովորաբար շատ թանկ է արժենում։
Ռոբոտների զգայական ինտերֆեյս
Լրացուցիչ ինֆորմացիա։ Զգայական տեխնոլոգիա
Ռոբոտները կիրառվում են նաև վիրտուալ իրականության ինտերֆեյս նախագծելու համար։ Մասնագիտացված ռոբոտները լայնորեն կիրառվում են զգայական հետազոտությունների գիտական շրջաններում։ Այս «զգայական ինտերֆեյս» կոչվող ռոբոտները թույլ են տալիս սենսորային էկրանների միջոցով մարդու փոխազդեցությունը իրական և վիրտուալ միջավայրերի հետ։ Ռոբոտն իր ազդեցությամբ թույլ է տալիս վերարտադրել իրական օբյեկտների մեխանիկական հատկությունները
Ռոբոտները ժամանակակից մշակույթում
[խմբագրել | խմբագրել կոդը]Տես նաև․Երևակայական ռոբոտների և անդրոիդների ցանկ, Դրոիդ
Գրականություն
[խմբագրել | խմբագրել կոդը]Հիմնական հոդված․ Ռոբոտների դերը գրականությունում
Ռոբոտային կերպարները, անդրոիդները (արհեստական տղամարդ/կին) կամ գինոիդները (արհեստական կին) կամ կիբորգները (նաև բիոնիկական տղամարդ/կին կամ ավելի կատարյալ մեխանիկական բնութագրերով մարդիկ) դարձել են գիտաֆանտաստիկ գրականության հիմնական նյութը։
Արևմտյան գրականությունում մեխանիկական ստրուկների մասին առաջին հիշատակությունը հանդիպում է Հոմերոսի «Իլիականում»։ Գիրք XVIII-ում կրակի աստված Հեփեստոսը ռոբոտների օգնությամբ հերոս Աքիլեսի համար նոր զրահ է պատրաստում։
Ըստ Ռիեի (Էմիլ Վիկտոր Ռիե) թարգմանության՝ ոսկե ստրկուհիները շտապեցին օգնել իրենց տիրոջը։ Դրանք նման էին իրական կանանց և կարող էին ոչ միայն խոսել և շարժել իրենց վերջույթները, այլև անմահ աստվածները նրանց օժտել էին ինտելեկտով և սովորեցրել ձեռքով աշխատել։ Նրանք չէին բնութագրվում «ռոբոտ» կամ «անդրոիդ» տերմիններով բայց միանշանակ իրենցից ներկայացնում էին մարդանման մեխանիկական սարքեր։ «Ռոբոտ» տերմինը առաջին անգամ օգտագործվել է Կարել Չապեկի Ռ.Ու.Ռ. պիեսում (Ռոսումի ունիվերսալ ռոբոտները, գրված 1920 թվականին)։
20-րդ դարի ամենահարուստ գրական ժառանգությունն ունի Այզեկ Ազիմովը (1920–1992), ով հեղինակ է ավելի քան 500 գրքերի։ Ազիմովը առավել հայտնի է իր գիտաֆանտաստիկ պատմություններով, հատկապես ռոբոտների մասին, որոնցում նա մեծ ուշադրություն է դարձրել նրանց փոխազդեցությանը մարդկանց հետ։ Ազիմովը խնամքով դիտարկել է ռոբոտներին ներկայացվող այն հրահանգները, որոնք դրանց անվտանգ կդարձնեն մարդկաց համար և համգել է ռոբոտատեխնիկայի երեք խնդիրների ձևակերպմանը․ 1․ ռոբոտը չի կարող վնաս հասցնել մարդուն կամ անգործության պատճառով հնարավոր դարձնել մարդու վնասումը, 2․ ռոբոտը պետք է ենթարկվի մարդու հրամաններին, եթե դրանք չեն հակասում առաջին օրենքին, 3․ ռոբոտը պետք է պաշտպանի իր գոյությունը, եթե դա չի հակասում առաջին և երկրորդ օրենքներին։ Երեք օրենքները ներկայացվել են իր 1942 թվականին գրված «Շուրջպար» կարճ պատմությունում։ Ավելի ուշ Ազիմովը ավելացրել է սկզբնական օրենքը՝ ռոբոտը չի կարող վնաս հասցնել մարդուն կամ անգործության պատճառով հնարավոր դարձնել մարդու վնասումը։ Մնացած օրենքները հաջորդաբար փոփոխվել են առաջինին չհակասելու համար։
Համաձայն Օքսֆորդի անգլերեն բառարանի, Ազիմովի «Սուտասանը» կարճ պատմության առաջին մասը, որտեղ հանդիպում է առաջին օրենքը, «ռոբոտատեխնիկա» տերմինի ամենաառաջին հիշատակությունն է։ Ազիմովը սկզբում այդ մասին չգիտեր, նա ենթադրում էր բառն արդեն գոյություն ունի մեխանիկայի, հիդրավլիկայի և տեխնիկայի այլ ճյուղերի նման։
Ֆիլմեր
[խմբագրել | խմբագրել կոդը]Տես նաև՝ ֆիլմեր ռոբոտների մասին
Ռոբոտներ հայտնվել են շատ ֆիլմերում։ Դրանց մեծ մասը իրականում գոյություն չունեն։ Երկու ամենահայտնի ռոբոտներն են «Աստղային պատերազմներ»-ում նկարահանված R2-D2 և C-3PO-ն։
Սեքս-ռոբոտներ
[խմբագրել | խմբագրել կոդը]Հիմնական հոդված։ Սեքս ռոբոտ
Մարդանման սեքս-ռոբոտների գաղափարը գրավել է հասարակության ուշադրությունը, ինչպես նաև առաջացրել որոշ անհանգստություն։ Դրա հակառակորդները պնդում են, որ սեքս-ռոբոտների ստեղծումը անբարո է, վնասակար հասարակության համար և ստորացուցիչ կանանց և երեխաների համար։
Ժամանակակից մշակույթում ի հայտ եկած խնդիրները
[խմբագրել | խմբագրել կոդը]Ռոբոտների հետ կապված վախերը և կասկածներն անընդհատ արտահայտվել են շատ գրքերում և ֆիլմերում։ Հիմնական թեման բարձր զարգացած ինտելեկտով ռոբոտների ստեղծումն է, որոնք սպառնում են ոչնչացնել մարդկությունը։ Առաջին գիտաֆանտաստիկ վեպ համարվող «Ֆրանկենշտեյնը» (1818 թվական) դարձել է իրենց ստեղծողին գերազանցող ռոբոտների կամ անդրոիդների հոմանիշ։
Նմանատիպ թեմաներով աշխատանքների օրինակներ են «Մեխանիկական մարդը», «Տերմինատորը», «Դասալիքը», «Ռոբոտ-ոստիկանը», Կրկնօրինակողները՝ «Աստղային դարպասներում», Սայլոնները «Գալակտիկա հածանավում», Կիբերմարդը և Դալեկները «Դոկտոր ով»-ում, «Մատրիցան», «Էնտիրանը», «Ես ռոբոտ եմ» և այլն։ Որոշ մտացածին ռոբոտներ ծրագրավորված են սպանելու և ոչնչացնելու համար, մյուսները ձեռք են բերում գերմարդկային ինտելեկտ և հնարավորություն կատարելագործելու իրենց սեփական ծրագրային և տեխնիկական ապահովումը։ Չարիք դարձած ռոբոտների մասին տարածված հաղորդումների շարքից են «2001 Օդիսեյ տիեզերքը», «Կարմիր մոլորակը» և Էնտիրանը։
2017 թվականի Horizon Zero Dawn խաղը ուսումնասիրում է պատերազմում ռոբոտատեխնիկայի թեմաները, ռոբոտների էթիկան, և արհեստական ինտելեկտի կառավարման խնդիրները, ինչպես նաև շրջակա միջավայրի վրա այդ տեխնոլոգիաների դրական կամ բացասական ազդեցությունը։
Մեկ այլ արդի թեմա է մարդու «գերբնական հովիտ» կոչվող արձագանքը՝ անհանգստությունը և նույնիսկ զզվանքը մարդուն չափազանց նման կրկնօրինակող ռոբոտների նկատմամբ։
Վերջերս «A.I. Artificial Intelligence», «Ex Machina» և «2016 TV Westworld» ֆիլմերում արհեստական ինտելեկտով ռոբոտներ են ցուցադրվել և մեծացրել համակրանքը ռոբոտների նկատմամբ։
Ծանոթագրություններ
[խմբագրել | խմբագրել կոդը]- ↑ «Four-legged Robot, 'Cheetah,' Sets New Speed Record». Reuters. 2012 թ․ մարտի 6.
- ↑ Definition of `robot`. Oxford English Dictionary. Retrieved November 27, 2016.
- ↑ https://www.conres.com/it-products-solutions/news-events/top-10-tech-trends-autonomous-agents-things/ Արխիվացված 2017-04-19 Wayback Machine retrieved April 18, 2017
- ↑ http://www.driverless-future.com/?page_id=384 retrieved April 18, 2017
- ↑ 5,0 5,1 «robotics». Oxford Dictionaries. Արխիվացված է օրիգինալից 2011 թ․ մայիսի 18-ին. Վերցված է 2011 թ․ փետրվարի 4-ին.
- ↑ Ivan Margolius,'The Robot of Prague', Newsletter, The Friends of Czech Heritage no. 17, Autumn 2017, pp. 3 - 6. https://czechfriends.net/images/RobotsMargoliusJul2017.pdf Արխիվացված 2017-09-11 Wayback Machine
- ↑ 7,0 7,1 Karel Capek – Who did actually invent the word "robot" and what does it mean? at capek.misto.cz(չաշխատող հղում — պատմություն) – archive
- ↑ 8,0 8,1 Kurfess, Thomas R. (2005 թ․ հունվարի 1). «Robotics and Automation Handbook». Taylor & Francis. Վերցված է 2016 թ․ հուլիսի 5-ին – via Google Books.
- ↑ Pearce, Jeremy. "George C. Devol, Inventor of Robot Arm, Dies at 99", The New York Times, August 15, 2011. Retrieved February 7, 2012. "In 1961, General Motors put the first Unimate arm on an assembly line at the company's plant in Ewing Township, N.J., a suburb of Trenton. The device was used to lift and stack die-cast metal parts taken hot from their molds."
- ↑ Akins, Crystal. «5 jobs being replaced by robots». Excelle. Monster. Արխիվացված է օրիգինալից 2013 թ․ ապրիլի 24-ին. Վերցված է 2013 թ․ ապրիլի 15-ին.
- ↑ Hoy, Greg (2014 թ․ մայիսի 28). «Robots could cost Australian economy 5 million jobs, experts warn, as companies look to cut costs». ABC News. Australian Broadcasting Corporation. Վերցված է 2014 թ․ մայիսի 29-ին.
- ↑ «Telecom glossary "bot"». Alliance for Telecommunications Solutions. 2001 թ․ փետրվարի 28. Արխիվացված է օրիգինալից 2007 թ․ փետրվարի 2-ին. Վերցված է 2007 թ․ սեպտեմբերի 5-ին.
- ↑ Polk, Igor (2005 թ․ նոյեմբերի 16). «RoboNexus 2005 robot exhibition virtual tour». Robonexus Exhibition 2005. Վերցված է 2007 թ․ սեպտեմբերի 10-ին.
- ↑ Harris, Tom. «How Robots Work». How Stuff Works. Վերցված է 2007 թ․ սեպտեմբերի 10-ին.
- ↑ Needham, Joseph (1991). Science and Civilisation in China: Volume 2, History of Scientific Thought. Cambridge University Press. ISBN 0-521-05800-7.
- ↑ Currie, Adam (1999). «The History of Robotics». Արխիվացված է օրիգինալից 2006 թ․ հուլիսի 18-ին. Վերցված է 2007 թ․ սեպտեմբերի 10-ին.
- ↑ Noct. Att. L. 10
- ↑ Needham, Volume 2, 54.
- ↑ 19,0 19,1 «The da Vinci robot». J. Endourol. 20 (12): 986–90. 2006 թ․ դեկտեմբեր. doi:10.1089/end.2006.20.986. ISSN 0892-7790. PMID 17206888. «... the date of the design and possible construction of this robot was 1495 ... Beginning in the 1950s, investigators at the University of California began to ponder the significance of some of da Vinci's markings on what appeared to be technical drawings ... It is now known that da Vinci's robot would have had the outer appearance of a Germanic knight.»
- ↑ Deborah Levine Gera (2003). Ancient Greek Ideas on Speech, Language, and Civilization. Oxford University Press. ISBN 978-0-19-925616-7.
- ↑ Mark E. Rosheim (1994). "Robot evolution: the development of anthrobotics". p.2. Wiley-IEEE. 0-471-02622-0
- ↑ "Robots then and now". BBC.
- ↑ O'Connor, J.J. and E.F. Robertson. «Heron biography». The MacTutor History of Mathematics archive. Վերցված է 2008 թ․ սեպտեմբերի 5-ին.
- ↑ Strong, 2007, էջ 143
- ↑ Strong, 2007, էջ 133-134
- ↑ Fowler, Charles B. (1967 թ․ հոկտեմբեր). «The Museum of Music: A History of Mechanical Instruments». Music Educators Journal. MENC_ The National Association for Music Education. 54 (2): 45–49. doi:10.2307/3391092. JSTOR 3391092.
- ↑ «Earliest Clocks». A Walk Through Time. NIST Physics Laboratory. Արխիվացված է օրիգինալից 2008 թ․ մայիսի 31-ին. Վերցված է 2008 թ․ օգոստոսի 11-ին.
- ↑ New Scientist. IPC Magazines: 32–35. 2007 թ․ հուլիսի 6.
{{cite journal}}: Missing or empty|title=(օգնություն) - ↑ Varadpande, Manohar Laxman (1987). History of Indian Theatre, Volume 1. էջ 68.
- ↑ Wujastyk, Dominik (2003). The Roots of Ayurveda: Selections from Sanskrit Medical Writings. էջ 222.
- ↑ Needham, Joseph (1965). Science and Civilisation in China: Volume 4, Physics and Physical Technology Part 2, Mechanical Engineering. էջ 164.
- ↑ «Leonardo da Vinci's Robots». Leonardo3.net. Վերցված է 2008 թ․ սեպտեմբերի 25-ին.
- ↑ Jane Marie Law, Puppets of Nostalgia – The Life, Death and Rebirth of the Japanese Awaji Ningyo Tradition, 1997, Princeton University Press, 978-0-691-02894-1
- ↑ Wood, Gabby. "Living Dolls: A Magical History Of The Quest For Mechanical Life", The Guardian, 2002-02-16.
- ↑ Edwyn Gray, Nineteenth-century torpedoes and their inventors, page 18
- ↑ Gray, Edwyn (2004). Nineteenth-Century Torpedoes and Their Inventors. Naval Institute Press. ISBN 1-59114-341-1.
- ↑ Marc Seifer Life and Times of Nikola Tesla, page 1893 google books
- ↑ Benjamin Franklin Miessner, Radiodynamics: The Wireless Control of Torpedoes and Other Mechanisms, D. Van Nostrand Company, 1916, page 83
- ↑ US 613809
- ↑ «Tesla – Master of Lightning». PBS.org. Վերցված է 2008 թ․ սեպտեմբերի 24-ին.
- ↑ «Merriam-Webster Dictionary: robot». «Origin: Czech, from robota, compulsory labor»
- ↑ «Science Diction: The Origin Of The Word 'Robot'».
- ↑ «AH Reffell & Eric Robot (1928)». Արխիվացված է օրիգինալից 2013 թ․ նոյեմբերի 11-ին. Վերցված է 2018 թ․ փետրվարի 6-ին.
- ↑ «Meet Mr. Robot – Not Forgetting His Master». The Age. 1935 թ․ սեպտեմբերի 20. Վերցված է 2017 թ․ մարտի 7-ին.
- ↑ «Robot Dreams : The Strange Tale Of A Man's Quest To Rebuild His Mechanical Childhood Friend». The Cleveland Free Times. Արխիվացված է օրիգինալից 2010 թ․ հունվարի 15-ին. Վերցված է 2008 թ․ սեպտեմբերի 25-ին.
- ↑ Scott Schaut (2006). Robots of Westinghouse: 1924-Today. Mansfield Memorial Museum. ISBN 0-9785844-1-4.
- ↑ Owen Holland. «The Grey Walter Online Archive». Արխիվացված է օրիգինալից 2008 թ․ հոկտեմբերի 9-ին. Վերցված է 2008 թ․ սեպտեմբերի 25-ին.
- ↑ Waurzyniak, Patrick (2006 թ․ հուլիս). «Masters of Manufacturing: Joseph F. Engelberger». Society of Manufacturing Engineers. 137 (1). Արխիվացված է օրիգինալից 2011 թ․ նոյեմբերի 9-ին. Վերցված է 2008 թ․ սեպտեմբերի 25-ին.
- ↑ «Robot Hall of Fame – Unimate». Carnegie Mellon University. Արխիվացված է օրիգինալից 2011 թ․ սեպտեմբերի 26-ին. Վերցված է 2008 թ․ օգոստոսի 28-ին.
- ↑ «National Inventor's Hall of Fame 2011 Inductee». Invent Now. Արխիվացված է օրիգինալից 2014 թ․ նոյեմբերի 4-ին. Վերցված է 2011 թ․ մարտի 18-ին.
- ↑ «Company History». Fuji Yusoki Kogyo Co. Արխիվացված է օրիգինալից 2013 թ․ փետրվարի 4-ին. Վերցված է 2008 թ․ սեպտեմբերի 12-ին.
- ↑ «KUKA Industrial Robot FAMULUS». Արխիվացված է օրիգինալից 2013 թ․ հունիսի 10-ին. Վերցված է 2008 թ․ հունվարի 10-ին.
- ↑ «History of Industrial Robots» (PDF). Արխիվացված է օրիգինալից (PDF) 2012 թ․ դեկտեմբերի 24-ին. Վերցված է 2012 թ․ հոկտեմբերի 27-ին.
- ↑ «History of Industrial Robots». robots.com. Արխիվացված է օրիգինալից 2015 թ․ հուլիսի 8-ին. Վերցված է 2015 թ․ օգոստոսի 24-ին.
- ↑ «About us». Արխիվացված է օրիգինալից 2014 թ․ հունվարի 9-ին.
- ↑ «Archived copy». Արխիվացված է օրիգինալից 2015 թ․ հոկտեմբերի 7-ին. Վերցված է 2015 թ․ հոկտեմբերի 6-ին.
{{cite web}}: CS1 սպաս․ արխիվը պատճենվել է որպես վերնագիր (link) - ↑ Robots to get their own operating system, by Mehret Tesfaye Ethipian Review, August 13, 2009.
- ↑ Research and Development for Next-generation Service Robots in Japan, United Kingdom Foreign Ministry report, by Yumiko Moyen, Science and Innovation Section, British Embassy, Tokyo, Japan, January 2009.
- ↑ «Robotic Tactile Sensing – Technologies and System». Springer.com. Վերցված է 2014 թ․ փետրվարի 8-ին.
- ↑ First Name Middle Name Last Name. «IEEE Transaction on Robotics – Special Issue on Robotic Sense of Touch». Ieeexplore.ieee.org. Վերցված է 2014 թ․ փետրվարի 8-ին.
- ↑ "Robotics in practice: Future capabilities" by Joseph F. Engelberger. in "Electronic Servicing & Technology" magazine 1982 August.
- ↑ The Caterpillar Self-Driving Dump Truck Արխիվացված 2011-06-07 Wayback Machine, By Tim McKeough, Fast Company, November 25, 2008.
- ↑ Self-Driving Trucks to Revolutionize Logistics, DHL Says, Richard Weiss, December 9, 2014.
- ↑ VIDEO: Why Caterpillar’s autonomous mining tech is “completely different from anything” it’s ever done Wayne Grayson | October 16, 2014.
- ↑ Self-driving dump trucks, automatic shovels coming to Australian mines, KAORI TAKAHASHI, April 23, 2015.
- ↑ Forget self-driving Google cars, Australia has self-driving trucks, by Matthew Hall, October 20, 2014.
- ↑ Australian mining giant Rio Tinto is using these huge self-driving trucks to transport iron ore, Charles Clark, Oct. 19, 2015.
- ↑ Daddy, What Was a Truck Driver? Over the Next Two Decades, the Machines Themselves Will Take Over the Driving, By DENNIS K. BERMAN, July 23, 2013, wsj.com.
- ↑ «Robot can read, learn like a human». 2010 թ․ դեկտեմբերի 6.
- ↑ Robots: Brave New World moves a step closer, By James Melik, Reporter, Business Daily, BBC World Service, 3 January 2013.
- ↑ 71,0 71,1 Zunt, Dominik. «Who did actually invent the word "robot" and what does it mean?». The Karel Čapek website. Արխիվացված է օրիգինալից 2012 թ․ փետրվարի 4-ին. Վերցված է 2007 թ․ սեպտեմբերի 11-ին.
- ↑ «Indo-European root ''*orbh-''». Web.archive.org. 2008 թ․ մայիսի 12. Արխիվացված է օրիգինալից 2009 թ․ հունվարի 24-ին. Վերցված է 2014 թ․ փետրվարի 8-ին.
- ↑ «Online Etymology Dictionary». Վերցված է 2012 թ․ հունիսի 10-ին.
- ↑ Ranger, Steve. «Robots of death, robots of love: The reality of android soldiers and why laws for robots are doomed to failure». TechRepublic. Վերցված է 2017 թ․ հունվարի 21-ին.
- ↑ P. Moubarak, P. Ben-Tzvi, Adaptive Manipulation of a Hybrid Mechanism Mobile Robot, in Proceedings of IEEE International Symposium on Robotic and Sensors Environments, ROSE ’11, 2011, Montreal, Canada, pp. 113 – 118.
- ↑ Zhang, Gexiang; Pérez-Jiménez, Mario J.; Gheorghe, Marian (2017 թ․ ապրիլի 5). Real-life Applications with Membrane Computing (անգլերեն). Springer. ISBN 9783319559896.