Робот


Роботът е машина с автоматично управление, която може автономно да изпълнява определени задачи, почти винаги с помощта на електронен хардуер и програмирани инструкции. Чрез своя вид и движения роботите често създават усещането, че имат собствени намерения и самостоятелна способност за действие.[1][2]
Роботите обикновено се използват за изпълнение на задачи, прекалено еднообразни, мръсни или опасни за човека. Индустриалните роботи, използвани в промишленото производство, са най-често срещаният вариант, но постепенно се появяват и потребителски роботи, почистващи пода или косящи трева. Други приложения включват почистване на разливания на токсични вещества, изследване на океаните и космоса, хирургия, минно дело, спасителни операции, търсене на пехотни и танкови мини. Роботите си проправят път в развлекателната индустрия и домашното здравеопазване.
Наименование
[редактиране | редактиране на кода]Думата „робот“ произлиза от чешката дума „robota“, означаваща работа, но и ангария, изморителен труд (робски труд). Тя е използвана за първи път от писателя Карел Чапек в пиесата му „R.U.R.“ (Росумски универсални роботи), публикувана през 1920 година.[3]
В пиесата на Карел Чапек роботите са продукти на фабрика за изкуствени хора, близки до днешната концепция за андроиди, машини, които могат да бъдат сбъркани с хора. Тяхната безжизненост постепенно се променя и поведението им започва да се ръководи от емоции и чувства. Един от проблемите в пиесата е дали роботите са обект на експлоатация и какви са последствията от отношението към тях.
Според самия Карел Чапек, думата не е измислена от него, а от неговия брат, художникът и писател Йозеф Чапек.[3] В своя статия за списанието Лидове новини от 1933 година Карел Чапек обяснява, че първоначално е възнамерявал да нарече създанията „лабори“ (от латинското „labor“, „труд“), но думата не му харесва и той иска съвет от брат си, който предлага „роботи“.
Думата роботика (на английски: robotics), описваща научно-приложната област, изследваща роботите, е създадена от Айзък Азимов.
Определение
[редактиране | редактиране на кода]Думата робот се използва по отношение на голям набор от машини, които могат да извършват движение и физически операции. Те се проявяват в множество форми, вариращи от хуманоид, който имитира човешката форма и начин на придвижване, до индустриални, чиито вид се определя от функцията, която изпълняват. Роботите могат да се групират на мобилни (в това число и автономни превозни средства), манипулаторни (индустриални роботи), и реконфигурируеми, които се приспособяват към задачата, която изпълняват.
Те могат да се контролират от човек – например управляваните от разстояние роботи за обезвреждане на бомби, роботизирани ръце и др. Могат да действат в съответствие със заложена в тях способност за вземане на решения, предоставена от изкуствен интелект. Повечето съществуващи роботи попадат между тези две крайни категории и се управляват от програмирани компютри. Такива роботи могат да съдържат обратна връзка, за да взаимодействат със средата, но не притежават действителна интелигентност.
Думата робот се използва също така в общ смисъл за всяка машина, която имитира действия на човек във физически или мисловен смисъл.
История
[редактиране | редактиране на кода]
В много древни митологии присъстват изкуствени хора като механичните слуги, създадени от древногръцкия бог Хефест,[4] Галатея, оживялата статуя на Пигмалион, глинените го̀леми от еврейската легенда или глинените гиганти от скандинавските митове.
През 4 век пр.н.е. гръцкият математик Архит описва механична птица, задвижвана с пара. В съставения по същото време китайски текст Лие Дзъ се описва срещата между древен владетел и изобретател, където са представени множество автомати, включително хуманоидно устройство.[5] През I век александриецът Херон създава множество автоматизирани устройства и описва машини, задвижвани с въздушно налягане, пара и вода.[6]
През 12 век арабският учен Ал-Джазари конструира няколко автоматични машини, сред които кухненски уреди и програмируеми музикални автомати, задвижвани с вода.[7][8] В края на 15 век италианецът Леонардо да Винчи прави подробни чертежи на механичен рицар, който може да сяда и да движи части от тялото си.[9] В началото на 18 век французинът Жак дьо Вокансон демонстрира няколко подвижни автомата в естествен размер – свирачи на флейта и гайда и патица.[10] В края на века в Япония са описани множество механични играчки и животни.
През 19 век японският изобретател Хисашиге Танака създава много крайно усложнени механични играчки, някои от които могат да сервират чай, да изстрелват стрели и дори да изписват японски логограми.[11] През 1898 година Никола Тесла демонстрира радиоуправляемо торпедо[12] и има намерение да доразвие идеята си в система от оръжия за американския военноморски флот.[13][14]
През 1926 година Уестингхаус Електрик Корпорейшън създава Телевокс, първият робот използван за полезна работа. През следващите години те създават няколко нови модела, сред които е хуманоидният Електро, използван за демонстрации.[15][16] Първите електронни автономни роботи са конструирани в Англия от американеца Уилям Грей Уолтър през 1948 – 1949 година. Тези устройства, наречени Елмър и Елзи, могат да усещат светлината и допира до външни предмети и да използват тези стимули, за да се ориентират при придвижване.[17]
Първият същински съвременен робот, програмируем и с цифрово управление, е създаден от американеца Джордж Девол. През 1954 година той патентова програмируем манипулатор. В създадената през 1956 година фирма за роботи се разработва първият в света индустриален робот, наречен Унимейт, който е инсталиран през 1961 година в завод на Дженеръл Мотърс и се използва за повдигане и подреждане на горещи метални отливки.[18]

През следващите десетилетия промишлените роботи се разпространяват широко, извършвайки различни дейности по-евтино или с по-голяма точност и надеждност от хората. Те се използват и за работи, които са твърде мръсни, опасни или отегчителни, за да бъдат извършвани от хора. Роботите намират широко приложение в производството, сглобяването, пакетирането, транспорта, наземните и космически изследвания, хирургията, въоръжението, лабораторните изследвания.
Съвременни приложения
[редактиране | редактиране на кода]Индустриални роботи
[редактиране | редактиране на кода]
Роботите стават все по-сложни и това увеличава употребата им в индустрията. Главната употреба на роботи дотогава е била автоматизацията на индустриите за масово производство, при които е необходимо непрекъснато да се повтарят определени операции по един и същ начин. Пример за използването на големи и сложни роботи е при производството на автомобили.
Роботите се използват в процесите на боядисване, заваряване и сглобяване на автомобили. Те са подходящи за подобни операции, тъй като задачите могат да бъдат точно определени и трябва да се изпълняват по един и същ начин без голяма необходимост от обратна връзка за контрол на конкретния начин, по който е било извършено действието. Размерът на индустриалните роботи може да варира в голяма степен, поради което могат да извършват значително повече действия, отколкото би могъл човек. Целта на тези роботи е да се замени тежката дейност на оператора и да се постигне максимална повтаряемост и скорост на операцията. Един от параметрите, който определя качеството на робота, е теглото на детайлите, които се транспортират от него. Друг параметър е точността на позициониране на изпълнителния механизъм. За да се постигне максимална точност се извършва калибриране на роботите: robot calibration. Точността на индустриалните роботи обикновено е 0,5 мм при повтаряемост 0,1 мм. Често индустриалните роботи се използват съвместно с транспортни роботизирани комплекси, които движейки се по предварително маркирани транспортни пътеки (например електрически проводници под земята), доставят необходимите материали за работа. Много често роботите са част от автоматизирани линии или автоматизирани машини за производство. Една област на използване в съвременната индустрия е за монтаж на електронни изделия. Причината е голямата серийност на изделията и необходимостта от облекчаване на труда. Основната цел на съвременните индустриални роботи е увеличаването на производителността на труда, качеството на продуктите и поевтиняване на производството. Около 40% от индустриалните роботи в света се намират в Япония.
В България индустриални роботи са произвеждани в комбинат „Берое“ Стара Загора преди 1990 година. Управляващите устройства за тях са произвеждани в ДЗУ.
Минни роботи
[редактиране | редактиране на кода]Поради естеството на дейността в мините, особено подземните, последно време широко се използват автономни, полуавтономни и телеуправляеми роботи. Редица производители на транспортни машини произвеждат камиони и товарни съоръжения, които товарят материал, транспортират го и го разтоварват без човешка намеса. Фирмата Рио Тинто (Rio Tinto Group), използва автономни камиони на Коматсу за транспорт в мина в Западна Австралия.[19]
Поради големите предимства, които осигурява въвеждането на роботи в минното производство, и други фирми внедряват автономни съоръжения.
Разузнавателни роботи
[редактиране | редактиране на кода]Те могат да работят в неприятна или опасна за човека среда – например обезвреждане на бомби, работа под водата, в минното дело и за почистване на токсични отпадъци. В последния случай се използват роботи, които да патрулират. При аварията на АЕЦ Фукушима за работа по авариралите реактори се използват два вида роботи „Миниробо“. Единият е човекоподобна машина с 4 камери, сензори за температура, задименост и ниво на радиация. С помощта на механичната си ръка „Миниробо“ ще мести евентуални препятствия по пътя си, но също така ще събира различни предмети, ако това е необходимо. Другият вид са наречени „змии“. Те са по-малки по размери и могат да се вмъкват на недостъпни места. От тях се очаква да подадат информация, вкл. визуална, за състоянието на реакторите и на хранилищата за отработено гориво.[20]
Превозни средства с автоматично насочване са подвижни роботи, които се използват в големи съоръжения като складове и болници и пристанища за обработка на контейнери, за превозването на стоки или дори за патрулиране с цел осигуряване на безопасността и сигурността. Подобни превозни средства следват кабели, маркери или използват лазерно насочване за навигиране в района.
Изследването на отдалечени космически обекти, като например Марс, става също така с управлявани от Земята роботизирани комплекси. Проблем в този случай е голямото време необходимо за преминаване на сигнала до Марс и обратно. Затова автономно изпълняваните функции на този робот трябва да са възможно максимални.
Космически роботи
[редактиране | редактиране на кода]
Специални хуманоидни роботи се разработват за изследване на космоса. НАСА разработва съвместно с други организации роботи, които трябва да се използват в условията на космически полет, както и за изследване на други планети.
Международната космическа станция има една роботизирана ръка – Канадарм2, и към нея Декстър (манипулатор за специални цели), които се използват за товарно-разтоварни дейности и дейности извън станцията.
Първият робот, който изпращат от НАСА по тази програма е Робонавт 2 (от робот и астронавт), разработен съвместно с Дженерал Мотърс. През февруари 2011 той е изпратен на МКС. Със своите дълги човекоподобни ръце, той трябва да използва същите инструменти като хората от станцията. Робонавт 2 е изработен на модулен принцип, така че могат да се сменят ръце, „глава“ или торс. Той е изпратен без крака, но по-късно те ще могат да се добавят и да се използва като се придвижва в станцията. По-късно трябва стъпка по стъпка да бъде променен за работа извън станцията. Робонавт 2 има четири видеокамери, както и инфрачервена камера, общо 350 датчика, всяка ръка има 7 степени на свобода, шията – 3 степени, а китката 12 степени на свобода. В корема му са разположени 38 процесора PowerPC и с програмно обезпечение за обработка на визуалната информация, за да може той да се ориентира самостоятелно в околната среда, както и да предава информация.[21]
Целта на този експеримент е да се провери възможността робот да се използва в условията на безтегловността и вредните космически лъчения, да се работи съвместно с космонавтите и да се проверят възможностите за използване на роботи при продължителни и далечни космически полети.
Персонални роботи
[редактиране | редактиране на кода]На пазара се предлагат домашни роботи, които извършват прости операции като почистване на прах или косене на трева. Примери за такива са Scooba и Roomba, производство на iRobot, Robomower на Friendly Robotics и Automower на Electrolux.
Други домашни роботи са предназначени да правят компания или да играят с хора. Примери за това са Айбо на компанията Сони, успешен продукт, представляващ куче-робот, Paro – робот бебе-тюлен, който се грижи за пациенти в домовете им и Wakamaru – хуманоиден робот, предназначен за възрастни хора и хора с увреждания.
Медицински роботи
[редактиране | редактиране на кода]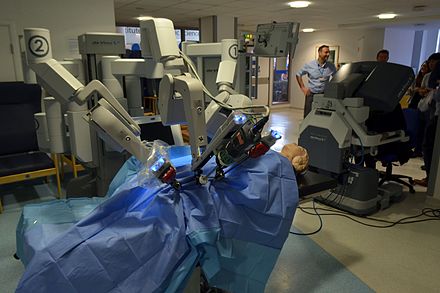
Медицинските роботи се използват в различни области на медицината. Това са хирургия, диагностика и медицински грижи.
Широко използван в САЩ и Германия робот, известен на пазара е хирургичен робот да Винчи (Da Vinci Surgical System), разработен за лапароскопски операции с минимално направени разрези. При тези роботи операциите се извършват от хирург, който се намира в същото помещение и чрез дистанционно управлявани манипулатори непосредствено наблюдава и с голяма точност извършва манипулциите. Има изследвания по отношение на ефективността на този робот и няма категорично потвърждение за неопровержимото предимство на този вид операции в гинекологията и урологията.
За медицински грижи на пациентите има различни съоръжения. Целта на роботиката е да създаде робот, който да осигурява помощ на лежащо болни вместо медицинско лице за 24 часа на ден.
Военни роботи
[редактиране | редактиране на кода]
Военните роботи са роботи, които се използват за военни разузнавателни и бойни цели. Те могат да се придвижват самостоятелно във въздуха, по земята и под водата. Това са например различни видове военни дронове. Използват се за разузнаване и бойни цели.
За целите на военните е разработен транспортен робот BigDog. Разработката не се използва, но е интересна, защото целта е да се направи транспортно муле, което да повтаря функциите на движение на жив организъм.
За целите на военните и за целите на полицейските служби се използват управляеми от разстояние манипулатори, служещи за обезвреждане на взривни устройства. При тях целта е да се запази животът на оператора.
Правителството на САЩ със своите структури обявява състезание за разработка на транспортен робот DARPA Grand Challenge, което трябва да осигури транспортно сухопътно средство, което да премине самостоятелно определено разстояние при тежки условия.
Роботи за игра и състезания
[редактиране | редактиране на кода]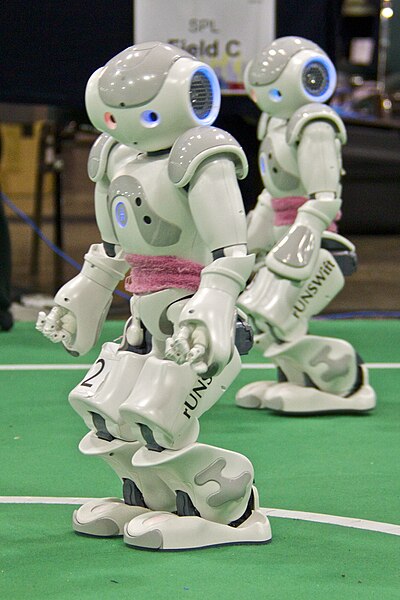
Освен различни роботи играчки, които са без особени възможности, има и много роботи, които специално се разработват за игри, но смисълът е в комплексното развитие на роботиката. От години се провеждат международни състезания по футбол за роботи от различни категории. Това са състезанията за отбори от роботи (английски RoboCup). Целта на тези състезания, поставена при тяхното начално създаване, е в средата на 21 век, отбор от напълно автономни хуманоидни роботи играчи по футбол, да победят по официалните правила на FIFA победителя по футбол от последната световна купа.[23] Всяка година тези състезания се провеждат последователно в различни страни в различни категории и заедно с това се провежда и международна конференция по роботика и изкуствен интелект.
Има много състезания в областта на роботиката, които са предназначени за различни научни нива и за различни цели на роботиката.
Наноботика
[редактиране | редактиране на кода]
Наноботиката или нанороботиката е технология за създаване на машини или роботи, чиито компоненти са с размери от порядъка на нанометри. В света са произведени само някои елементи от тези системи, като лагери, датчици, синтетични молекулярни мотори. Целта е да се създадат роботи с размерите на вирус или бактерия, които да изпълняват задачи на микрониво. Възможни области са микрохирургията (на ниво клетка), производство на оръжие и др.

Груповата роботехника или swarm robotics е направление в роботиката, при което се моделира държането на мравките и пчелите и се създават хиляди миниатюрни роботи, които изпълняват различни задачи заедно, като почистване, разузнаване и други. Всички те работят като един организъм и предимството е, че със загубата на част от тях не се нарушава общото изпълнение на задачата, за разлика от единичен робот, чийто загуба води до провала ѝ.
Развитие на технологиите
[редактиране | редактиране на кода]Развитието на роботите е свързано пряко с развитието на различни области на науката и технологиите:
Начини на придвижване
[редактиране | редактиране на кода]
Голям брой съвременни роботи са стационарни, захранват се от стационарната мрежа и извършват действия със своите изпълнителни органи (манипулатори). Но все повече предназначения изискат мобилност на роботите. Има различни системи за тяхното придвижване, като най-разпространени са колесни, верижни (военни), с различни кинематични схеми, като например лунохода, релсови и летящи (дронове). Има разработени различни бионични схеми на придвижване като BigDog и човекоподобни роботи. Известни са роботи, които използват принципи на движение на живите организми паяци, насекоми, птици, змии, риби и други. Интересна разработка е робот, движещ се върху сфера (ballbot), който балансирайки и премествайки центъра на тежестта си по време на движение се движи по една линия с минимален радиус на завиване.
Използват се различни видове двигатели, но най-често електрически. Развитието на литиевойонните батерии ги прави универсален и надежден източник за захранване и поради възможността директно да се използва за всички видове изпълнителни механизми. Автономността на роботите позволява те да се зареждат самостоятелно при необходимост.
Един вариант е използването на гъвкави задвижващи устройства като електроактивни полимери и пневматични мускули. Тяхното действие е близко до начина на действие на мускулните влакна и затова правят движенията на робота плавни като при живите организми.
Хуманоидни роботи
[редактиране | редактиране на кода]
С развитието на роботите все повече въпроси са свързани с използването им и отношенията между човека и робота. Тези въпроси са основно свързани с изкуствения интелект, бионичните методи на създаване на близки до живия организъм изпълнителни, сензорни и други органи, компютърно зрение и разпознаването на образите и други.
В историята на научната фантастика най-популярни са трите закона на роботиката на Айзък Азимов. Те са свързани с възможността при развитието на роботите да се стигне до конфликт между човека и робота. Българските автори на фантастическа литература Любен Дилов и Никола Кесаровски допълват този закон с Четвърти и пети закон на роботиката.
Автономните роботи, които се развиват, могат да изпълняват различни задачи през различните периоди на деня. Част от тях са създадени, за да имитират чисто човешки поведение и емоции. Освен това те могат да комуникират с компютърните мрежи, наблюдават околната среда, изпълняват определени команди в позната среда, правят компания на хора и други. В това отношение те все още са много ограничени във функциите си.
Клейтроника
[редактиране | редактиране на кода]Клейтрониката (claytronic) е абстрактна концепция за бъдещото развитие на роботиката, състояща се в обединяването на нанороботиката и информационните технологии. Целта е създаването на индивидуални компютри с атомни размери, наречени клейтронни атоми или катоми. Те ще могат да се свързват едни с други и да създават материални 3D обекти, с които може да си комуникира човека. Крайната идея е да се създаде програмируема материя. Наименованието на тази концепция идва от групата Claytronic, която е група от учени от различни научни дисциплини от университета Карнеги-Мелон в Питсбърг-Пенсилвания и лаборатории на Интел. Етапът на развитие е много начален и изследванията се правят само за принципите на взаимодействие.
Характеристики на катома на бъдещето:
- Размерите на катома ще определят и разрешаващата способност на формираното макротяло. Поради възможността за максимална подвижност, той трябва да бъде близък по форма до сфера.
- Липса на автономност на движенията. Той не трябва да притежава собствени подвижни органи на движението. Движенията на катома трябва да се извършват от електростатично или електромагнитно взаимодействие между отделните катоми.
- Липса на собствено захранване. Енергията за движението им трябва да се подава отвън, от катом към катом.
- Автономна интелигентност и способности. Катомът трябва да притежава собствен нанокомпютър или други електронни наноустройства и способности, като например светочувствителност и други.
- Комуникиране чрез специално разработено програмно обезпечение, при което всеки отделен катом получава необходимата информация за местоположение и свързване с другите катоми. Разработват се няколко програмни езика за целта.
Източници
[редактиране | редактиране на кода]- ↑ robot // Merriam-Webster, 2010. Посетен на 9 септември 2010.
- ↑ robot // Yahoo! Education. Yahoo!, 2010. Архивиран от оригинала на 2012-04-10. Посетен на 9 септември 2010.
- ↑ а б Zunt, Dominik. Who did actually invent the word „robot“ and what does it mean? // The Karel Čapek website. Архивиран от оригинала на 2006-12-06. Посетен на 11 септември 2007.
- ↑ Ancient Greek Ideas on Speech, Language, and Civilization. Oxford University Press, 2003. ISBN 978-0199256167.
- ↑ Needham, Joseph. Science and Civilization in China: Volume 2. Taipei, Caves Books, 1986.
- ↑ O'Connor, J.J и др. Heron biography // The MacTutor History of Mathematics archive. Посетен на 5 септември 2008.
- ↑ Fowler, Charles B. The Museum of Music: A History of Mechanical Instruments // Music Educators Journal 54 (2). MENC_ The National Association for Music Education, October 1967. DOI:10.2307/3391092. с. 45 – 49. Архивиран от оригинала на 2022-09-27.
- ↑ Sharkey, Noel. A 13th Century Programmable Robot // The University of Sheffield, 2010. Архивиран от оригинала на 2007-06-29. Посетен на 18 септември 2010.
- ↑ Leonardo da Vinci's Robots // Leonardo3.net. Посетен на 25 септември 2008.
- ↑ Wood, Gabby. Living Dolls: A Magical History Of The Quest For Mechanical Life // The Guardian, 2002.
- ↑ Hornyak, Timothy N. Loving the Machine: The rt and Science of Japanese Robots. New York, Kodansha International, 2006. ISBN 4-7700-3012-6.
- ↑ Cheney, Margaret. Tesla, man out of time. New York, Dorset Press, 1989. ISBN 0-88029-419-1.
- ↑ Патент номер 613809, САЩ
- ↑ Tesla – Master of Lightning // PBS.org. Посетен на 24 септември 2008.
- ↑ Robot Dreams: The Strange Tale Of A Man's Quest To Rebuild His Mechanical Childhood Friend // The Cleveland Free Times. Архивиран от оригинала на 2010-01-15. Посетен на 25 септември 2008.
- ↑ Schaut, Scott. Robots of Westinghouse: 1924-Today. Mansfield Memorial Museum, 2006. ISBN 0978584414.
- ↑ Holland, Owen. The Grey Walter Online Archive // Архивиран от оригинала на 2008-10-09. Посетен на 25 септември 2008.
- ↑ Robot Hall of Fame – Unimate // Carnegie Mellon University. Архивиран от оригинала на 2011-09-26. Посетен на 28 август 2008.
- ↑ www.telegraph.co.uk[неработеща препратка]
- ↑ Роботите влизат във „Фукушима I“, в. Труд, 22 март 2011, стр. 30
- ↑ NASA отправило в космос первого человекоподобного робота
- ↑ commons.wikimedia.org
- ↑ RoboCup: Objective // RoboCup, 1998. Архивиран от оригинала на 2014-01-04. Посетен на 26 януари 2014.
- ↑ Michael Hahn. Fullerene Nanogears // NASA, 1 април 1997. Посетен на 27 май 2008. Архив на оригинала от 2013-02-28 в Wayback Machine.
Вижте също
[редактиране | редактиране на кода]Външни препратки
[редактиране | редактиране на кода]- КИБЕРТРОН – Български хуманоиден роботАрхив на оригинала от 2022-05-26 в Wayback Machine.
- Robotics-bg.com: Форум по роботика
- Robotika.bg: Българска школа по роботика за ученици
|