Робот
Ро́бот (від чеськ. robota) — автоматичний пристрій, що призначений для виконання виробничих та інших операцій, які зазвичай виконувала безпосередньо людина. Для опису автоматичних пристроїв дія яких не має зовнішньої схожості з діями людини, переважно вживають термін «автомат».
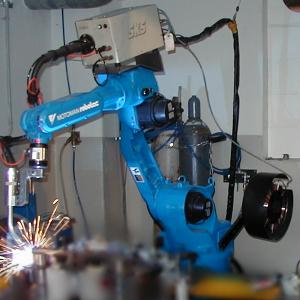
У більшості випадків сучасні роботи промислового призначення — це «руки», маніпулятори, закріплені на основі і призначені для виконання одноманітної роботи на зразок складання, переміщення та інше. До роботів також належать мобільні пристрої, що працюють у небезпечних для людини середовищах і керовані дистанційно, наприклад роботи, котрі працюють на великих водних глибинах, у космосі, пристрої військового призначення (ведення розвідки, розмінування, доправлення боєприпасів тощо) та інше, а також роботизовані іграшки.
Робот може втілюватися як керований системою керування електромеханічний, пневматичний, гідравлічний пристрій або їх поєднання, основне призначення якого — заміна людини на виробництві, небезпечних чи шкідливих середовищах, побуті тощо.
Робот може безпосередньо виконувати команди оператора, може працювати за заздалегідь складеною програмою або дотримуватись набору загальних вказівок з використанням технології штучного інтелекту. Ці завдання дозволяють полегшити або зовсім замінити людську працю на виробництві, в будівництві, при роботі з важкими вантажами, шкідливими матеріалами, а також в інших важких або небезпечних для людини умовах.
Окремий вид роботів — нанороботи. Це роботи, розміром зіставні з молекулою (менше 10 нм), що мають здатність руху, обробки і передавання інформації, виконання програм. Нанороботи, які спроможні до створення власних копій, тобто самовідтворення, називаються реплікаторами[1]. Наноробототехніка перебуває на науково-технічній стадії розвитку з перспективою застосування у медицині, генній інженерії та інших галузях.
Роботами можуть називатися як фізичні пристрої, так і комп'ютені програми, також звані ботами[2]. Зазвичай до характеристик роботів зараховуються: керованість електронною програмою; обробка даних або фізичних подразників у електронному вигляді, що зумовлює певну реакцію робота; автономність; здатність до маніпуляцій фізичними об'єктами чи процесами; імітація діяльності людей або тварин; виконання певного завдання краще за людину (швидше, точніше, продуктивніше); виконання замість людини небажаної роботи[3].
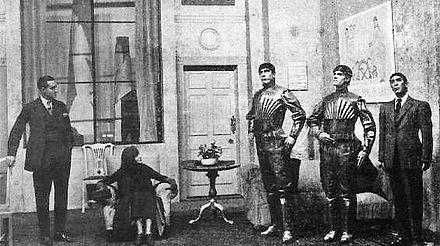
Прийнятий зараз у всьому світі термін був запропонований чеським письменником Карелом Чапеком та його братом Йозефом і вперше використаний у 1921 в п'єсі К.Чапека «Р.У.Р.» (чеськ. R.U.R.; скорочення від чеськ. Rossumovi univerzální roboti). Так він назвав штучних біологічних істот, які зовні нагадували людей та працювали замість людей[4].
Спочатку для означення такого типу технічних об'єктів було використане слово похідне від латинського «labor» (робота), але потім Карел Чапек прислухався до поради свого брата Йозефа й зупинився на похідній від чеського «robota»[5]. Чеською слово означало «важка, каторжна праця». Це цілком відповідало змістові п'єси, у якій роботи виконували замість людей усю найважчу або рутинну працю[4].
Упродовж декількох наступних років п'єсу поставили у більшості великих міст світу. Чапек отримав славу та статки, а слово «робот» увійшло до словників багатьох мов.
1928-го в першому виданні «Оксфордського словника англійської мови» при слові «робот» зазначалося, що його створив автор п'єси «Р. У. Р.» Карел Чапек. Той одразу спростував інформацію — вказав, що насправді творцем слова є його брат Йозеф[6].

Сенсори дозволяють роботу збирати інформацію про довкілля, щоб використати її для зміни своєї поведінки. Відеокамери дозволяють роботу оцінювати форму та колір об'єктів, а також визначати розмір і відстань до об'єктів. Мікрофони дозволяють роботам виявляти звуки. Завдяки датчикам, як-от кнопки, вбудовані в бампери, робот здатний визначити зіткнення з перешкодою. Деякі роботи оснащені термометрами та барометрами для визначення температури та тиску навколишнього середовища. Роботи, оснащені датчиками виявлення та визначення відстані (лідарами), використовують лазери для побудови тривимірних карт довкілля; їх можуть замінювати ехолокатори. Деякі роботи оснащені спеціалізованими датчиками, як-от акселерометри та магнітометри, які дозволяють роботам орієнтуватися відносно сили тяжіння та магнітного поля Землі[7]. Хімічні аналізатори використовують там, де є потреба в визначенні складу речовин, виявленні шкідливих домішок[8].
Маніпулятори (ефектори) — це частини робота, якими він орудує об'єктами навколо і всередині себе. Знаряддя, вмонтовані до робота, як-от свердло, називаються кінцевими ефекторами. Ефектори відповідають призначенню робота. Наприклад, для переміщення дрібних предметів, робота раціонально оснастити захватом, а для маніпуляцій з великими — присоскою. Стаціонарні роботи мають платформу, до якої прикріплюються; вона може бути нерухомою чи змінювати положення залежно від завдання[8].
Для переміщення робота використовують колеса, гусениці, пропелери, котрі приводять в рух електродвигуни. Пневматику та гідравліку застосовують там, де роботові потрібна велика сила для виконання певного завдання. Гучномовці дозволяють деяким роботам спілкуватися з ними або видавати звукові сигнали[7]. Найпростіший робот має вигляд руки з прикріпленим до неї інструментом. Складніші можуть наслідувати будову живих організмів, зокрема й людини[9].
Керівні системи визначають поведінку робота. Залежно від їхнього типу, роботи можуть бути попередньо запрограмованими чи автономними. Попередньо запрограмовані роботи нечутливі до змін у довкіллі, або реагують на них дуже обмежено. Такі роботи працюють належно лише тоді, коли всі можливі зміни в довкіллі передбачені їхньою програмою дій. Автономні ж роботи реагують на зміни в довкіллі в широких межах[7].
Найпростіша керівна система складається з датчика, який при дії на нього подразника, запускає відповідний маніпулятор. Складніші системи містять пристрій-посередник (подобу мозку), здатний забезпечувати різні реакції на той самий подразник, залежно від контексту[7]. Людино-машинний інтерфейс робота призначений для того, щоб людина могла коригувати поведінку робота. Це може бути пульт, до якого робот під'єднаний дротами, або окремий пристрій чи програма, наприклад, планшет із бездротовим зв'язком[8].
Джерело живлення забезпечує діяльність всіх інших частин робота. Стаціонарні роботи зазвичай, живляться від електромережі, тоді як автономні отримують енергію від акумуляторів або сонячних батарей[9].
Системи безпеки захищають робота чи людей від небажаних дій. Наприклад, системи аварійної зупинки припиняють діяльність робота, якщо вона виходить за певні межі. Також робот може подати сигнал людині, якщо в його роботі сталося щось непередбачене. Промислові роботи оснащуються пристроями, що зупиняють робота, коли поруч є людина, щоб випадково не травмувати її[8].

За середовищем, у якому діють роботи, вони поділяються на такі різновиди[10]:
- Повітряні роботи, також знані як безпілотні літальні апарати (БПЛА) або дрони.
- Наземні або домашні роботи або безпілотні наземні транспортні засоби.
- Підводні роботи, або автономні підводні апарати.
- Полярні роботи, призначені для пересування крижаними та нерівними місцевостями.
- Роботи-доставники, призначені для переміщення матеріалів і припасів у розміченому робочому середовищі.
Роботів також можна розділити на дві групи за рухливістю: ті, які здатні пересуватися в своєму середовищі (дрони, роботизовані візки, зонди тощо), й ті, що жорстко в ньому закріплені (наприклад, роботизовані руки для зварювання металів)[11].
За автономністю роботи бувають автономними та керованими. Автономні діють самостійно без спрямування з боку людини, тоді як керовані потребують зовнішніх команд у процесі виконання свого завдання[10].
Залежно від розміру, роботи поділяються на макророботів (роботів видимих розмірів), мікророботів (чиї розміри порівнянні з мікроорганізмами) і нанороботів (молекулярних і атомарних розмірів)[12][13].
Технологічними попередниками роботів були автоматони — механічні пристрої, здатні зображати якусь людську дію. Автоматони створювалися для розваги і водночас демонстрували майстерність механіків. Переважно вони були рухомими ляльками. Так, автоматон, створений Аль-Джазарі в 1206 році, зображав чотирьох музикантів, які грали на різних інструментах. «Заводний молільник», створений Хуанело Турріано у 1560-х роках приводився в рух пружиною та зображав чоловіка, який молиться, ворушачи губами та руками[14].
У 1949 році британський нейрофізіолог і винахідник американського походження Вільям Грей Волтер створив пару роботів у формі черепах, що живилися від батареї та могли маневрувати навколо предметів, орієнтуючись на джерело світла[4].
Першим стаціонарним промисловим роботом був програмований Unimate, гідравлічна рука з електронним керуванням, яка могла повторювати довільні послідовності рухів. Цього робота винайшов у 1954 році американський інженер Джордж Девол, а розробила компанія Unimation Inc. 1959 року прототип Unimate був представлений на ливарному заводі корпорації General Motors у Трентоні, Нью-Джерсі. 1961 року Condec Corp. поставила Unimate на завод General Motors, де робот переміщував гарячі металеві частини автомобілів[15].
У 1954 Barrett Electronics Corporation представила роботизований навантажувач, який використовували на продуктовуму складі в Південній Кароліні. Роботи такого типу, названі AGV (Automatic Guided Vehicles) зазвичай рухаються вздовж дротів, прокладених по підлозі. У 1980-х роках AGV стали обладнувати мікропроцесорними контролерами, які дозволяли реалізувати складнішу поведінку. З 1990-х їх використовують на складах, орієнтуючись на світловідбивачі[15].
Наприкінці 1960-х і в 1970-і роки у Массачусетському технологічному інституті (MIT) і в Стенфордському університеті розробили досконаліших роботів з комп'ютерним керуванням і сенсорами-відеокамерами. Віктор Шейнман розробив роботизовану руку PUMA (Programmable Universal Machine for Assembly), яку з 1978 року використовували для складання автомобільних компонентів. PUMA неодноразово наслідували для створення промислових роботів різної спеціалізації[15]. Того ж року японський дослідник автоматизації Хіроші Макіно сконструював SCARA (Selective Compliance Assembly Robot Arm) — роботизовану руку, здатну одним плавним рухом схопити та перемістити маленький предмет[4]. З 1990-х років малі роботизовані руки стали поширеним обладнанням в лабораторіях молекулярної біології, точно обробляючи масиви пробірок і піпетуючи складні послідовності реагентів[15].

Хоча перших промислових роботів використовували у США, більшого поширення вони набули в Японії. Перспектива старіння населення та, як наслідок, нестача робочої сили спонукали японських виробників експериментувати з передовою автоматизацією. До кінця 1980-х років Японія, а саме робототехнічні підрозділи Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group і Honda Motor Company, Ltd. стала світовим лідером у виробництві та використанні промислових роботів. Високі витрати на робочу силу в Європі також спонукали до впровадження роботів. 2001 року в Європейському Союзі кількість промислових роботів уперше перевищила їхню кількість в Японії[15].
Перші програми робототехнічного бачення стали розроблятися на початку 1970-х років, щоб зробити поведінку роботів адаптивнішою. В середині 1980-х у МІТ створювалися експериментальні комахоподібні роботи, на яких відпрацьовувалися різні способи уникнення перешкод при русі. Дослідження допомогли створити марсоходи, які могли долати короткі відстані на Марсі без контролю з боку людей[15].
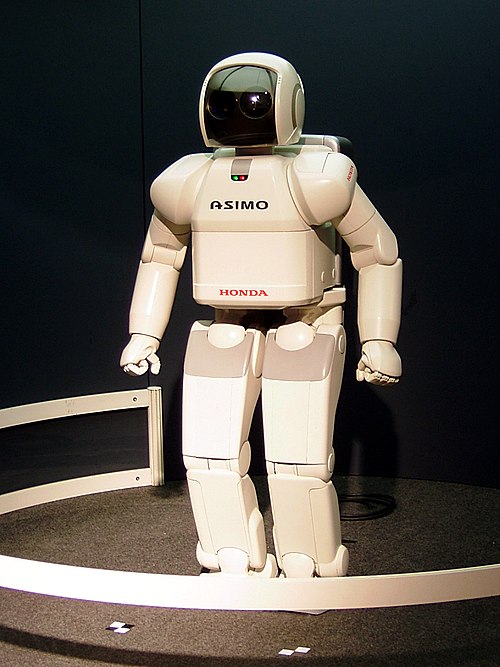
Компанія SRI International у 1960-і розробила Shakey, першого автономного робота, що орієнтувався завдяки власним сенсорам. Потім у середині 1980-х Honda запустила програму гуманоїдної робототехніки. Вона розробила P3, який міг ходити, а також потискати руки. Кульмінацією роботи став ASIMO[17].
У 1980-х роках з'явилися іграшки з мікропроцесорним керуванням, які могли говорити або рухатися у відповідь на звуки чи світло. Досконаліші моделі 1990-х розпізнавали голоси та слова. 1999 року корпорація Sony представила робота-собаку AIBO, що міг бігати за кольоровими м'ячами та розпізнавати. 1993 року міжнародне співтовариство дослідників організувало довгострокову програму розробки роботів, здатних грати в футбол, щоб удосконалювати таким чином нові способи орієнтування роботів у просторі та взаємодії одних з одними. Перші ігри під назвою RoboCup відбулися в 1997 році в Нагої, Японія[15].
У 2000 році Синтія Брізіл сконструювала Kismet — роботизовану голову, що зображала різні емоції та змінювала їх у відповідь на тон голосу. Roomba виробництва iRobot став першим функціональним роботом широкого вжитку, цей робот-пилосос, продажі якого розпочалися в 2002 році, продавця в кількості понад 15 млн примірників. З 2003 роботи-візки Kiva почали використовувати на складах для доставки товарів покупцям. У 2005 DARPA випробувало перший робоавтомобіль, який проїхав 211 км по пустелі Мохаве[4].
Boston Dynamics у 2004 створила чотириного робота BigDog, здатного ходити по місцевості зі складним, брудним ландшафтом[4]. А в 2013 вона розробила гуманоїдного робота Atlas, який міг ходити та виконувати сальто назад. Boston Dynamics також розробила чотириногого робота під назвою Spot, який може відновлювати рівновагу після ударів і падінь[17].
Військове застосування роботів розпочалося з 1972 року, коли було створено першого робота для розмінувань. Найбільше використовували розвідувальних та ударних повітряних роботів після Холодної війни. Станом на 2022 рік, понад 100 країн мали їх у своїх арміях[18].
В 2023 році, вперше в світі, людиноподібний робот Софія отримала громадянство Саудівської Аравії[19].
Промислові (індустріальні) роботи в останні десятиріччя майже повністю замінили людську працю в різноманітних галузях, особливо в технологічних процесах, де потрібна висока точність, швидкість та одноманітність, повторюваність операцій — в машинобудуванні та обробці матеріалів, у виробництві мікропроцесорів і навіть в таких технологіях як виробництво або складання паперово-картонної тари[20][21].
Роботизовані візки широко застосовуються великими компаніями для перевезень вантажів на складах[22].
Сільськогосподарський робот або агроробот — робот, якого використовують у сільськогосподарських цілях.
Основна область застосування роботів у сільському господарстві — процес вирощення та збирання врожаю. Фермери вже використовують роботизовані трактори та жатки. Експериментальні роботи автоматизують такі операції, як обрізка, проріджування, косіння, обприскування та видалення бур'янів, боротьба зі шкідниками та хворобами рослин[23].
Доволі широко роботи задіяні в сортуванні сільськогосподарської продукції[22].
Роботи зручні для збирання інформації про умови довкілля, особливо в небезпечних або важкодоступних місцях, як-от узбережні води чи шахти[10].

Застосування роботів у медицині включає допомогу в хірургічних операціях, догляді та спостереженні за хворими. Роботи виконують дрібні точні операції всередині тіла, де є ризик пошкодити судини, наприклад, у серці чи репродуктивних органах. Також роботи допомагають у реабілітації людям з обмеженою рухливістю, піднімаючи їх із ліжок і транспортуючи. Роботи здатні наглядати за психічним здоров'ям пацієнтів за допомогою відеокамер і мікрофонів[23].
Роботи в вигляді людини чи окремих частин тіла слугують для тренувань медиків[22].
Крім того роботів використовують для отримання отрут, що є складниками деяких ліків, із отруйних тварин, як-от скорпіонів[22].
Мікро- та нанороботи є перспективним засобом збору біологічного матеріалу, точної доставки ліків усередині організму та виконання хірургічних операцій з мінімальною шкодою для пацієнтів[13].

Побутовий робот — робот, призначений для допомоги людині в повсякденному житті. Більшість побутових роботів — це автономні пристрої для прибирання та нагляду за домівкою: роботи-прибиральники (робот-пилосос, робот для миття підлоги[24] тощо), роботизовані газонокосарки[25], роботи для чищення басейнів[26], каналізаційних труб тощо, роботизовані камери спостереження[27].
До побутових роботів також зараховуються домашні роботи-іграшки та соціальні роботи[27] чи «емоційні компаньйони», які замінюють співрозмовників[28].

Поширеними роботами військового спрямування є дрони, які використовують для спостереження та цілевказування на полі бою. Військові безпілотники, які літають над районами війни та конфліктів, у ситуаціях захоплення заручників, а також у зонах стихійних лих і техногенних катастроф, здатні оцінювати рівень небезпеки та надавати солдатам і рятувальникам інформацію в реальному часі[23]. Дрони також здобули широке використання як засоби доставки ракет для ураженя цілей на ворожій території. Зазвичай дрони доставляють ракети в напівавтоматичному режимі, а атака відбувається за командою[18][29].
Наземні колісні та гусеничні роботи, обладнані руками, допомагають у виявленні та знешкодженні вибухових пристроїв[30][31]. Експериментальні роботи транспортують військове спорядження[10], евакуюють постраждалих людей[32], можуть бути озброєні для вогневої підтримки солдатів і поліції[33][34].
Роботів використовують також для імітації цілей під час тренувань з бойової стрільби[22].
Розважальні роботи призначені сприяти проявам емоцій у людей[35]. Це здебільшого роботи-іграшки, так, як робособака AIBO. Розважальних роботів можуть використосувати у змаганнях, наприклад, грати в футбол; реагувати на мову та жести[36]; слугувати рухомими скульптурами персонажів масової культури[37]; допомагати в розвагах, наприклад, подавати тенісні м'ячі[38]; готувати та роздавати напої тощо. На роботів можуть монтуватися атракціони, освітлювальна техніка[39].

Роботи мають застосування в освіті, щоб допомагати молодшим дітям навчитися сприймати емоції, розігрувати освітні сценарії, можуть виконувати за педагогів рутинні завдання[40]. Помітне поширення роботи мають у STEM-освіті, заохочуючи дітей та підлітків вивчати предмети через практичні завдання, пов'язані з роботами: їх конструювання, програмування[41][42].
Існують компанії, що спеціалізуються на виробництві роботів (серед найбільших — iRobot Corporation). Роботів також розробляють та випускають деякі компанії, що працюють у галузі високих технологій: ABB, Honda, Mitsubishi, Sony, World Demanded Electronic, Gostai, KUKA.
Проводяться виставки роботів, наприклад найбільша у світі iRex (англ. International robot exhibition; проводиться на початку листопада один раз на два роки в Токіо, Японія)[43].
Етика використання роботів або робоетика поєднує ідеї експертів у галузі робототехніки, штучного інтелекту, інформатики та інженерії з думками експертів у галузі філософії, права, психології та соціології, задля впевненості, що розробки та впровадження автоматизації не створюють етичної небезпеки для окремих людей і суспільства[44].
Айзек Азімов у оповіданні «Брехун!» 1941 року вперше описав три закони робототехніки, що, на його думки, мали б убезпечити людей від можливої шкоди з боку роботів:
- Робот не може нашкодити людині або через свою бездіяльність допустити, щоб людині було завдано шкоди;
- Робот мусить підкорятися наказам людини, коли ці накази не суперечать Першому закону;
- Робот повинен дбати про свою безпеку доти, поки це не суперечить Першому і Другому законам.
- Робототехніка
- Автоматизація
- HRP-4C японський робот-модель
- 15907 Робот — астероїд, названий на честь роботів[45].
- Наноробот
- Андроїд
- Нанотехнології
- Людино-машинна взаємодія
- Мехатроніка
- Айзек Азімов
- Всеукраїнський фестиваль робототехніки Robotica
- Кібернетика
- Біоробот
- ↑ Э.Дрекслер Машины созидания: грядущая эра нанотехнологии. Anchor Books, 1986. — ISBN 0-385-19973-2
- ↑ Escott, Eban (5 липня 2017). Bots vs Robots: what's the difference? (with examples). Codebots (англ.). Архів оригіналу за 21 липня 2022. Процитовано 21 липня 2022.
- ↑ Robot Exhibition RoboNexus 2005, San Jose - Stereo Virtual Tour. www.virtuar.com. Архів оригіналу за 12 серпня 2007. Процитовано 21 липня 2022.
- ↑ а б в г д е 13 Milestones in the History of Robotics. aventine.org (англ.). Архів оригіналу за 21 липня 2022. Процитовано 21 липня 2022.
- ↑ Владимир Парамонов Термину «робот» исполнилось 85 лет [Архівовано 2024-08-18 у Wayback Machine.] (рос.)
- ↑ Лєра Лауда Слово «робот» з'явилося 90 років тому [Архівовано 2024-08-18 у Wayback Machine.] на сайті «Gazeta.ua»
- ↑ а б в г Parts of a Robot. mind.ilstu.edu. Архів оригіналу за 13 грудня 2022. Процитовано 21 липня 2022.
- ↑ а б в г Guide to Robot Parts & Components and How to Source Them. #HowToRobot (англ.). 14 лютого 2022. Процитовано 21 липня 2022.
- ↑ а б The Main Parts of a Robot. Sciencing (англ.). Архів оригіналу за 21 липня 2022. Процитовано 21 липня 2022.
- ↑ а б в г What is a mobile robot? Definition from WhatIs.com. IoT Agenda (англ.). Архів оригіналу за 26 липня 2022. Процитовано 22 липня 2022.
- ↑ Types of Robots and Industry Applications of Robotics Technology. Intel (англ.). Процитовано 21 липня 2022.
- ↑ Giri, Gautham; Maddahi, Yaser; Zareinia, Kourosh (5 листопада 2021). A Brief Review on Challenges in Design and Development of Nanorobots for Medical Applications. Applied Sciences (англ.). Т. 11, № 21. с. 10385. doi:10.3390/app112110385. ISSN 2076-3417. Архів оригіналу за 23 липня 2022. Процитовано 23 липня 2022.
{{cite news}}: Обслуговування CS1: Сторінки із непозначеним DOI з безкоштовним доступом (посилання) - ↑ а б Home - Microrobots and Nanorobots for Biotechnology. conferences.nature.com. Архів оригіналу за 18 серпня 2024. Процитовано 23 липня 2022.
- ↑ A brief history of robots. Science Node. Архів оригіналу за 21 липня 2022. Процитовано 21 липня 2022.
- ↑ а б в г д е ж robot - The future | Britannica. www.britannica.com (англ.). Архів оригіналу за 21 липня 2022. Процитовано 21 липня 2022.
- ↑ Four-legged Robot, 'Cheetah,' Sets New Speed Record. [Архівовано 2013-10-22 у Wayback Machine.] Reuters. 2012-03-06.
- ↑ а б Simon, Matt. Everything You Ever Wanted To Know About Robots. Wired (амер.). ISSN 1059-1028. Процитовано 21 липня 2022.
- ↑ а б Combat drones: We are in a new era of warfare - here's why. BBC News (брит.). 4 лютого 2022. Архів оригіналу за 23 липня 2022. Процитовано 23 липня 2022.
- ↑ Вперше у світі роботу видали громадянство. 21.07.2023. Архів оригіналу за 21 липня 2023. Процитовано 21 липня 2023.
- ↑ Contact Systems. The C5 Series Pick and Place Machines. web.archive.org. 14 вересня 2008. Архів оригіналу за 14 вересня 2008. Процитовано 21 липня 2022.
- ↑ Assembléon - SMT Pick & Place Equipment - Overview & Benefits. web.archive.org. 3 серпня 2008. Архів оригіналу за 3 серпня 2008. Процитовано 21 липня 2022.
- ↑ а б в г д Roberts, Jonathan. Six ways robots are used today that you probably didn't know about. The Conversation (англ.). Архів оригіналу за 18 серпня 2024. Процитовано 21 липня 2022.
- ↑ а б в Top 5 Industries Utilizing Robotics. Ohio University (амер.). 14 березня 2018. Архів оригіналу за 21 липня 2022. Процитовано 21 липня 2022.
- ↑ iRobot Scooba. Floor washing robot. User manual [Архівовано 2012-07-16 у Wayback Machine.] (англ.)
- ↑ Павел Котов Роботизированная газонокосилка Bosch Indego [Архівовано 2015-02-17 у Wayback Machine.] на сайті «3Dnews» (рос.)
- ↑ iRobot Launches Verro Pool Cleaning Robots! [Архівовано 2014-08-14 у Wayback Machine.] (англ.)
- ↑ а б Lipski, Olivia; Institute, Good Housekeeping (6 квітня 2022). Yes, These Home Robots Can Actually Do Your Chores for You. Good Housekeeping (амер.). Архів оригіналу за 18 серпня 2024. Процитовано 23 липня 2022.
- ↑ The next generation of home robots will be more capable — and perhaps more social. Washington Post (англ.). 10 листопада 2021. Архів оригіналу за 9 серпня 2022. Процитовано 23 липня 2022.
- ↑ Military drones - the new air force. Drone Rush (амер.). 28 березня 2022. Архів оригіналу за 23 липня 2022. Процитовано 23 липня 2022.
- ↑ Allison, Peter Ray. What does a bomb disposal robot actually do?. www.bbc.com (англ.). Архів оригіналу за 23 липня 2022. Процитовано 23 липня 2022.
- ↑ Divers join NATO allies in bomb and mine disposal exercises. www.royalnavy.mod.uk (англ.). Архів оригіналу за 26 липня 2022. Процитовано 23 липня 2022.
- ↑ Wagner, Alan R. (2021). Robot-Guided Evacuation as a Paradigm for Human-Robot Interaction Research. Frontiers in Robotics and AI. Т. 8. doi:10.3389/frobt.2021.701938/full. ISSN 2296-9144. Архів оригіналу за 18 серпня 2024. Процитовано 23 липня 2022.
{{cite news}}: Обслуговування CS1: Сторінки із непозначеним DOI з безкоштовним доступом (посилання) - ↑ Archive, View Author; Author, Email the; Twitter, Follow on; feed, Get author RSS (21 липня 2022). Robot dog equipped with submachine gun is 'dystopian' nightmare fodder. New York Post (амер.). Архів оригіналу за 23 липня 2022. Процитовано 23 липня 2022.
- ↑ Weaponized Robots? Military And Police Response Uses For Robots On The Rise. www.securityinformed.com. Процитовано 23 липня 2022.
- ↑ You are being redirected... www.analyticsinsight.net. Архів оригіналу за 21 липня 2022. Процитовано 21 липня 2022.
- ↑ Sabe, K. (2005). Development of entertainment robot and its future. Digest of Technical Papers. 2005 Symposium on VLSI Circuits, 2005. IEEE. с. 2—5. doi:10.1109/VLSIC.2005.1469320. ISBN 978-4-900784-01-7. Архів оригіналу за 26 квітня 2024. Процитовано 23 липня 2022.
- ↑ Hornyak, Tim (9 січня 2021). Entertainment robots the latest craze worldwide as the pandemic rages on. CNBC (англ.). Архів оригіналу за 23 липня 2022. Процитовано 23 липня 2022.
- ↑ Kavtaradze, Megi (15 січня 2022). Who Do You Play With? 4 Interesting Entertainment Robots. My Site (англ.). Архів оригіналу за 23 липня 2022. Процитовано 23 липня 2022.
- ↑ Entertainment industry automation. KUKA AG (en-DE) . Архів оригіналу за 23 липня 2022. Процитовано 23 липня 2022.
- ↑ 7 Examples of Robotics in Education to Know | Built In. builtin.com (англ.). Архів оригіналу за 3 травня 2023. Процитовано 3 травня 2023.
- ↑ What is Educational Robotics?. Ebotics (амер.). Архів оригіналу за 3 травня 2023. Процитовано 3 травня 2023.
- ↑ Screpanti, Laura; Miotti, Beatrice; Monteriù, Andrea (2021). Scaradozzi, David (ред.). Robotics in Education: A Smart and Innovative Approach to the Challenges of the 21st Century. Makers at School, Educational Robotics and Innovative Learning Environments (англ.). Springer International Publishing. с. 17—26. doi:10.1007/978-3-030-77040-2_3. ISBN 978-3-030-77040-2. ISSN 2367-3389. Архів оригіналу за 18 серпня 2024. Процитовано 3 травня 2023.
- ↑ INTERNATIONAL ROBOT EXHIBITION. Архів оригіналу за 9 листопада 2013. Процитовано 29 липня 2014.
- ↑ Team | 09/09/2021, A3 Online Marketing. Robot Ethics: Where Values And Engineering Meet. Automate (англ.). Архів оригіналу за 23 серпня 2022. Процитовано 24 липня 2022.
- ↑ База даних малих космічних тіл JPL: Робот (англ.) .
- Робототехніка: підруч. для студ. вищ. навч. закл., що вивчають дисципліну «Робототехніка і мехатроніка» / В. І. Костюк, Г. О. Спину [та ін.]. — Київ: Вища школа, 1994. — 446, [1] с. — ISBN 5-11-004067-2
- O.Yu. Sergiyenko, V.V. Tyrsa. 3D optical machine vision sensors with intelligent data management for robotic swarm navigation improvement, IEEE Sensors Journal 2021 (10), pp. 11262-11274
- Oleg Sergiyenko, Mikhail V. Ivanov, Vera V. Tyrsa, Vladimir M. Kartashov, Moises Rivas-Lopez and Daniel Hern'andez-Balbuena, Wendy Flores-Fuentes, Julio C{\'e}sar Rodr{\'i}guez-Qui{\~n}onez, Juan Iv{\'a}n Nieto-Hip{\'o}lito, Wilmar Hernandez and Andrei Tchernykh, Data transferring model determination in robotic group, journal={Robotics Auton. Syst.}, Elsevier, year={2016}, volume={83}, pages 251—260
- Воротников С. А. Информационные устройства робототехнических систем: учебное пособие. — М.: Изд-во МГТУ им. Н. Э. Баумана, 2005. — 384 с. — ISBN 5-7038-2207-6
- Юревич Е. И. Основы робототехники [Текст]: учеб. пособие для вузов по направл. подгот. дипломир. спец. 652000 «Мехатроника и робототехника» (спец. 210300 «Роботы и робототехн. системы»). — 2-е изд. — СПб. : БХВ-Петербург, 2005. — 401 с. — ISBN 5-94157-473-8
- Developing and Applying Optoelectronics in Machine Vision/ O. Sergiyenko, J.C. Rodriguez-Quiñonez, IGI Global, 2016; 341p.
- Stereoscopic Vision Systems In Machine Vision, Models, And Applications (Book Chapter)/ Ramírez-Hernández, L.R., Rodríguez-Quiñonez, J.C., Castro-Toscano, M.J., Kolendovska, M., Murrieta-Rico, F.N.// Machine Vision And Navigation, 2019 Machine Vision and Navigation30 September 2019, Pages 241—265
- Lindner, L., Sergiyenko, O., Rivas-López, M., (…), Gurko, A., Kartashov, V.M. Machine vision system for UAV navigation; IEEE, 2016 International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles and International Transportation Electrification Conference, ESARS-ITEC, 2016; pp. 1–6. DOI: 10.1109/ESARS-ITEC.2016.7841356
- Oleksandr Sotnikov, Vladimir Kartashov, Oleksandr Tymochko, Oleg Sergiyenko, Vera Tyrsa, Paolo Mercorelli, Wendy Flores-Fuentes. Methods for Ensuring the Accuracy of Radiometric and Optoelectronic Navigation Systems of Flying Robots in a Developed Infrastructure. Chapter 16// Machine Vision and Navigation; Springer, Cham. pp. 537–578. Editors: Sergiyenko, Oleg, Flores-Fuentes, Wendy, Mercorelli, Paolo. DOI: 10.1007/978-3-030-22587-2_16
- Ivanov, M., Sergiyenko, O., Mercorelli, P., Hernandez, W.c, Rodriguez Quinonez, J.C.d, Katashov V., Kolendovska, M., Iryna, T. Effective informational entropy reduction in multi-robot systems based on real-time TVS. IEEE International Symposium on Industrial Electronics, 2019-June,8781209, с. 1162—1167.
- Серія книг Springer Tracts in Advanced Robotics (Springer Nature, 2005-2024+)
- Серія книг Intelligent Robotics and Autonomous Agents series (MIT, 1997-2023+)
- Серія книг Chapman & Hall/CRC Artificial Intelligence and Robotics Series (Taylor & Francis; 2017-2024+)
- International Journal of Robotics Research (SAGE Publications)
- IEEE Transactions on Robotics (Інститут інженерів з електротехніки та електроніки, IEEE)
- Robotics and Autonomous Systems (Elsevier)
- Autonomous Robots (Springer Nature)
- Robotics and Computer-Integrated Manufacturing (Elsevier)
- Journal of Field Robotics (John Wiley & Sons)
- IEEE Robotics and Automation Magazine (Інститут інженерів з електротехніки та електроніки, IEEE)
- Journal of Intelligent and Robotic Systems: Theory and Applications (Springer Nature)
- IEEE Robotics and Automation Letters (Інститут інженерів з електротехніки та електроніки, IEEE)
- Science Robotics (сайт; AAAS)
- Advanced Robotics (Taylor & Francis)
- Advanced Intelligent Systems (сайт; Wiley-VCH)
- Візуальне керування рухомим об'єктом (стаття)[недоступне посилання з липня 2019]
- Роботи, фантастика, ретрофутуризм
- Ірина Когут. РОБОТИ І РОБІТНИКИ: ХТО ПОВСТАНЕ ПЕРШИМ?
- Robotics Portal Портал з робототехніки. (англ.) (італ.)
- Дослідження
- International Foundation of Robotics Research (IFRR) (англ.)
- International Journal of Robotics Research (IJRR) (англ.)
- Robotics and Automation Society (RAS) на сайті IEEE (англ.)
- Robotics Division на сайті NASA (англ.)
- Human Machine Integration Laboratory на сайті Університету штату Аризона (англ.)
- Valkyrie: NASA's Superhero Robot (відеоролик на YouTube про робота «Валькірія») (англ.)
- Journal of Field Robotics[недоступне посилання з квітня 2019] (англ.)
- Навчання
- Robotics Certification на сайті Коледжу Джорджа Брауна (англ.)
- Field and Space Robotics на сайті Массачусетського технологічного інституту (англ.)
- Robotics Institute на сайті Університету Карнегі-Меллон (англ.)
Сабреддіт (англ.) | |
| Про аудіо, відео(ігри), фото та мистецтво | |
| Література та бібліографія | |
| Тематичні сайти | |
| Словники та енциклопедії | |
| Довідкові видання | |
| Нормативний контроль | BNF: 12267450c · Freebase: /m/06fgw · GND: 4050208-9 · J9U: 987007541227305171 · LCCN: sh85114637, sh2008004640 · NDL: 00569589 · NKC: ph402600 |
| Технології |  | |
|---|---|---|
| Типи роботів | ||
| Відомі роботи | ||
| Розробники роботів | ||
| Теорії | ||
| Установи | ||
| Пов'язані терміни | ||