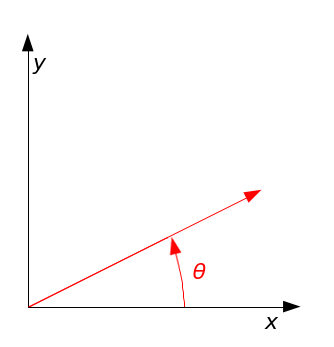
Matrika vrtenja (tudi matrika rotacije ali rotacijska matrika) je v linearni algebri matrika , ki opisuje vrtenje (rotacijo) v Evklidskem prostoru . Enostaven primer je matrika, ki zavrti točke v xy ravnini Kartezičnega koordinatnega sistema v nasprotni smeri od gibanja urinih kazalcev za kot
θ
{\displaystyle \theta \,}
R
=
[
cos
θ
−
sin
θ
sin
θ
cos
θ
]
{\displaystyle R={\begin{bmatrix}\cos \theta &-\sin \theta \\\sin \theta &\cos \theta \\\end{bmatrix}}}
Rotacijske matrike so vedno kvadratne , njeni elementi pa so realna števila . Matrike vrtenja so ortogonalne matrike , ki imajo determinanto enako 1. Zanje torej velja
R
T
=
R
−
1
,
det
R
=
1
{\displaystyle R^{T}=R^{-1},\det R=1\,}
Množica matrik vrtenja tvori grupo , ki jo poznamo kot rotacijsko grupo ali specialno ortogonalno grupo .
Matrike vrtenja označujemo z
R
{\displaystyle R\,}
Vrtenje vektorja v smeri gibanja urinih kazalcev za kot θ . Vektor je najprej usmerjen vzdolž osi x. Vrtenje vektorja za kot θ v sistemu z nestandardno usmeritvijo koordinatnih osi. V dveh razsežnostih ima matrika vrtenja obliko
R
(
θ
)
=
[
cos
θ
−
sin
θ
sin
θ
cos
θ
]
{\displaystyle R(\theta )={\begin{bmatrix}\cos \theta &-\sin \theta \\\sin \theta &\cos \theta \\\end{bmatrix}}}
Ta matrika zavrti stolpični vektor v skladu z
[
x
′
y
′
]
=
[
cos
θ
−
sin
θ
sin
θ
cos
θ
]
[
x
y
]
{\displaystyle {\begin{bmatrix}x'\\y'\\\end{bmatrix}}={\begin{bmatrix}\cos \theta &-\sin \theta \\\sin \theta &\cos \theta \\\end{bmatrix}}{\begin{bmatrix}x\\y\\\end{bmatrix}}}
Tako dobimo nove koordinate
(
x
′
,
y
′
)
{\displaystyle (x',y')\,}
(
x
,
y
)
{\displaystyle (x,y)\,}
x
′
=
x
cos
θ
−
y
sin
θ
{\displaystyle x'=x\cos \theta -y\sin \theta \,}
y
′
=
x
sin
θ
+
y
cos
θ
{\displaystyle y'=x\sin \theta +y\cos \theta \,}
Smer vrtenja vektorja je mišljena v nasprotni smeri od gibanja urinih kazalcev, če je
θ
{\displaystyle \theta \,}
θ
{\displaystyle \theta \,}
R
(
−
θ
)
=
[
cos
θ
sin
θ
−
sin
θ
cos
θ
]
{\displaystyle R(-\theta )={\begin{bmatrix}\cos \theta &\sin \theta \\-\sin \theta &\cos \theta \\\end{bmatrix}}\,}
Pogosto se uporabljajo vrtenja za 90° in 180°:
R
(
90
∘
)
=
[
0
−
1
1
0
]
{\displaystyle R(90^{\circ })={\begin{bmatrix}0&-1\\[3pt]1&0\\\end{bmatrix}}}
R
(
180
∘
)
=
[
−
1
0
0
−
1
]
{\displaystyle R(180^{\circ })={\begin{bmatrix}-1&0\\[3pt]0&-1\\\end{bmatrix}}}
R
(
270
∘
)
=
[
0
1
−
1
0
]
{\displaystyle R(270^{\circ })={\begin{bmatrix}0&1\\[3pt]-1&0\\\end{bmatrix}}}
Vrtenje vektorja v nestandardnem sistemu koordinatnih osi (glej sliko) se uporablja v dvorazsežni računalniški grafiki , kjer je izhodišče koordinatnega sistema v zgornjem levem kotu zaslona , pri tem pa y-os poteka navzdol po zaslonu računalnika .
Vrtenja okoli koordinatnih osi
x
,
y
,
z
{\displaystyle x,y,z\,}
R
x
(
θ
)
=
[
1
0
0
0
cos
θ
−
sin
θ
0
sin
θ
cos
θ
]
R
y
(
θ
)
=
[
cos
θ
0
sin
θ
0
1
0
−
sin
θ
0
cos
θ
]
R
z
(
θ
)
=
[
cos
θ
−
sin
θ
0
sin
θ
cos
θ
0
0
0
1
]
.
{\displaystyle {\begin{alignedat}{1}R_{x}(\theta )&={\begin{bmatrix}1&0&0\\0&\cos \theta &-\sin \theta \\[3pt]0&\sin \theta &\cos \theta \\[3pt]\end{bmatrix}}\\[6pt]R_{y}(\theta )&={\begin{bmatrix}\cos \theta &0&\sin \theta \\[3pt]0&1&0\\[3pt]-\sin \theta &0&\cos \theta \\\end{bmatrix}}\\[6pt]R_{z}(\theta )&={\begin{bmatrix}\cos \theta &-\sin \theta &0\\[3pt]\sin \theta &\cos \theta &0\\[3pt]0&0&1\\\end{bmatrix}}.\end{alignedat}}}
Poljubno vrtenje dobimo s pomočjo množenja matrik
V trirazsežnem prostoru, kjer je
a
{\displaystyle a\,}
θ
{\displaystyle \theta \,}
R
a
,
θ
∈
R
3
{\displaystyle R_{a,\theta }\in \mathbb {R} ^{3}}
R
a
,
θ
T
=
R
a
,
θ
−
1
{\displaystyle R_{a,\theta }^{T}=R_{a,\theta }^{-1}}
R
a
,
θ
{\displaystyle R_{a,\theta }\ }
ortogonalna matrika
det
(
R
a
,
θ
)
=
1
{\displaystyle \det \left(R_{a,\theta }\right)=1}
R
a
,
(
θ
+
r
)
=
R
a
,
θ
⋅
R
a
,
r
{\displaystyle R_{a,(\theta +r)}=R_{a,\theta }\cdot R_{a,r}}
R
a
,
0
=
I
{\displaystyle R_{a,0}=I\ }
lastne vrednosti
R
a
,
θ
{\displaystyle R_{a,\theta }\ }
{
1
,
e
lim
i
θ
}
=
{
1
,
cos
(
θ
)
+
i
sin
(
θ
)
,
cos
(
θ
)
−
i
sin
(
θ
)
}
,
{\displaystyle \{1,e^{\lim i\theta }\}=\{1,\ \cos(\theta )+i\sin(\theta ),\ \cos(\theta )-i\sin(\theta )\},}
sled matrike
R
a
,
θ
{\displaystyle R_{a,\theta }\ }
1
+
2
cos
(
θ
)
{\displaystyle 1+2\cos(\theta )\,}
kjer je
a
{\displaystyle a\,}
det
(
R
a
,
θ
)
{\displaystyle \det \left(R_{a,\theta }\right)\,}
determinanta
I
{\displaystyle I\,}
enotska matrika (
I
∈
R
n
{\displaystyle I\in \mathbb {R} ^{n}\,}
i
{\displaystyle i\,}
imaginarna enota za katero velja
i
2
=
−
1
{\displaystyle i^{2}=-1\,}
Matrika
Q
=
[
0
−
1
1
0
]
{\displaystyle Q={\begin{bmatrix}0&-1\\1&0\end{bmatrix}}}
odgovarja vrtenju za 90° v ravnini
Transponirana matrika matrike 2×2
M
=
[
0.936
0.352
0.352
−
0.936
]
{\displaystyle M={\begin{bmatrix}0.936&0.352\\0.352&-0.936\end{bmatrix}}}
je sama sebi obratna , ker pa je njena determinanta −1, to ni matrika vrtenja, je pa matrika, ki daje zrcaljenje preko premice
11
y
=
2
x
{\displaystyle 11y=2x\,}
Rotacijska matrika 3×3
Q
=
[
1
0
0
0
3
2
1
2
0
−
1
2
3
2
]
{\displaystyle Q={\begin{bmatrix}1&0&0\\0&{\frac {\sqrt {3}}{2}}&{\frac {1}{2}}\\0&-{\frac {1}{2}}&{\frac {\sqrt {3}}{2}}\end{bmatrix}}}
odgovarja vrtenju za −30° okoli x osi
Rotacijska matrika 3×3
Q
=
[
0.36
0.48
−
0.8
−
0.8
0.60
0
0.48
0.64
0.60
]
{\displaystyle Q={\begin{bmatrix}0.36&0.48&-0.8\\-0.8&0.60&0\\0.48&0.64&0.60\end{bmatrix}}}
odgovarja vrtenju za okoli -74° okoli osi (−1 ⁄3 ,2 ⁄3 ,2 ⁄3 )
Permutacijska matrika 3×3
P
=
[
0
0
1
1
0
0
0
1
0
]
{\displaystyle P={\begin{bmatrix}0&0&1\\1&0&0\\0&1&0\end{bmatrix}}}
je matrika vrtenja, kot je tudi vsaka soda permutacija
Naslednja matrika 3×3
M
=
[
3
−
4
1
5
3
−
7
−
9
2
6
]
{\displaystyle M={\begin{bmatrix}3&-4&1\\5&3&-7\\-9&2&6\end{bmatrix}}}
ima determinanto +1, toda njena transponirana ni sebi obrnjena, kar pomeni, da ni matrika vrtenja
Matrika 4×3
M
=
[
0.5
−
0.1
0.7
0.1
0.5
−
0.5
−
0.7
0.5
0.5
−
0.5
−
0.7
−
0.1
]
{\displaystyle M={\begin{bmatrix}0.5&-0.1&0.7\\0.1&0.5&-0.5\\-0.7&0.5&0.5\\-0.5&-0.7&-0.1\end{bmatrix}}}
ni kvadratna in tako ne more biti matrika vrtenja
Matrika 4×4
Q
=
[
−
1
0
0
0
0
−
1
0
0
0
0
−
1
0
0
0
0
−
1
]
{\displaystyle Q={\begin{bmatrix}-1&0&0&0\\0&-1&0&0\\0&0&-1&0\\0&0&0&-1\end{bmatrix}}}
predstavlja izoklinsko vrtenje ,
Matrika 5×5
Q
=
[
0
−
1
0
0
0
1
0
0
0
0
0
0
−
1
0
0
0
0
0
−
1
0
0
0
0
0
1
]
{\displaystyle Q={\begin{bmatrix}0&-1&0&0&0\\1&0&0&0&0\\0&0&-1&0&0\\0&0&0&-1&0\\0&0&0&0&1\end{bmatrix}}}
je matrika vrtenja, ker zavrti vektorje v ravnini prvih dveh koordinatnih osi za 90° in zavrti vektorje v ravnini drugih dveh osi za 180°, pri tem pa pusti zadnjo os nespremenjeno