Lopen

Lopen, gaan of stappen is een langzame symmetrische gang. De eerste woordvorm is gebruikelijk in Nederland, de laatste twee zijn dat in Vlaanderen, waar met lopen meestal hardlopen wordt bedoeld. Bij viervoetigen heet deze gang stap. De gang is symmetrisch omdat alle ledematen in dezelfde mate worden gebruikt.
Bij lopen op twee benen, ook wel bipedie genoemd, bevindt zich steeds een been aan de grond. Bij het vooruitbewegen verplaatst het lichaamsgewicht zich steeds naar het voorste been.
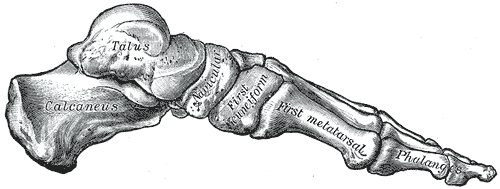
Bij het zich voortbewegen worden de voeten intensief gebruikt. De anatomische bouw van de menselijke voet is uniek voor het rechtop kunnen staan van de mens en het voortbewegen op twee voeten.
De menselijke voet bestaat uit een samenstelsel van 26 beenderen en 214 gewrichtsbanden. De holle bouw van de voet en de S-curve van de wervelkolom helpen om schokken ten gevolge van het zich voortbewegen op te vangen.
De gemiddelde snelheid van iemand die zich rustig voortbeweegt is ongeveer 4-5 km/h, afhankelijk van leeftijd, gezondheid en motief. Iemand van tachtig jaar heeft tijdens zijn leven ongeveer 120.000 km te voet afgelegd.
Een mensenkind kan pas lopen vanaf ongeveer zijn tweede of derde levensjaar. In het begin bestaat dit uit het lichaamsgewicht afwisselend op een been laten neerkomen en dan vlug het andere vooruitzetten. Geleidelijk ontwikkelt zich dat tot een rustig en met gevoel voor evenwicht stap voor stap de benen vooruitbewegen.
Loopcyclus
[bewerken | brontekst bewerken]
De loopcyclus kan in meerdere fasen worden onderverdeeld. Alleerst wordt onderscheid gemaakt tussen de standfase en de zwaaifase, met daarbinnen ook weer fases:
- standfase:
- steunopvang (shock absorption phase) of gewichtsacceptatie (weight acceptance):
- hielcontact (heel-strike) of eerste voetcontact (initial contact) op 0%. Hierbij staat de voet naar boven gebogen, in dorsiflexie. Daardoor raakt de rest van de voet de grond nog niet
- belastingname (loading response) zodra de rest van de voet volgt
- volcontact of middenstandfase (mid-stance-phase), waar duidelijk wordt dat de mens een zoolganger (plantigrade) is met vanaf ongeveer 15% de voetzool geheel aan de grond. De andere contralaterale voet zet zich rond de 10% af en begint de zwaaifase. De bipedale fase die begon met het hielcontact is nu afgelopen en een unipedale fase begint. Het steunbeen van dit ipsilaterale been draagt het grootste gewicht tijdens dit volledige zoolcontact (foot-flat)
- afzet (push-off phase):
- terminale standfase, beginnend met de hiel los (heel-off) rond de 45% waar de voet naar beneden buigt, in plantaire flexie, zodat de bal van de voet het gewicht gaat dragen
- pre-swing, zodra het andere contralaterale been volledig staat, kan de eerste ipsilaterale voet de laatste afzet doen met de grote teen tot teen los (toe-off)
- steunopvang (shock absorption phase) of gewichtsacceptatie (weight acceptance):
- zwaaifase:
- versnelling of initiële zwaaifase (initial swing)
- midzwaaifase (midswing)
- vertraging of terminale zwaaifase (terminal swing)
Zodra het eerste been weer hielcontact maakt, is een schrede voltooid. Een schrede bestaat bij de mens dus uit twee passen.
Spieractiviteit
[bewerken | brontekst bewerken]
Verschillende spieren spelen een rol bij het lopen die varieert van hielcontact (HS), zoolcontact (FF), middenstandfase (MS), hiel los (HO), teen los (TO), midzwaaifase (MSW) tot weer hielcontact.
Anatomie
[bewerken | brontekst bewerken]Om op twee benen te kunnen lopen, kent de mens een aantal anatomische aanpassingen. Zo ligt de positie en oriëntatie van het foramen magnum of achterhoofdsgat in het transversale vlak, wat beter uitkomt voor de verticale houding van de wervelkolom. Deze wervelkolom is ook niet C-vormig zoals bij viervoetigen, maar heeft een S-vormige lordose wat een betere ondersteuning van de rechtopstaande romp geeft. De tussenwervelindex ligt met ongeveer 72 aan de lage kant, wat langere paslengtes mogelijk maakt. De wervellichamen en vooral de lendenwervels zijn relatief groot, wat een verhoogde belastbaarheid van de rechtopstaande romp mogelijk maakt.
Het darmbeen in heup is kort, breed en gebogen en geeft zo steun voor de rechtopstaande romp, net als de naar voren stekende vleugel van het darmbeen. Door de aangepaste vorm van het bekken kunnen de kleine bilspieren zich naast het bekken bevinden. Door deze aan te spannen, wordt de romp tijdens het lopen richting het staande been getrokken, wat het evenwicht ten goede komt.
De afstand tussen heup en SI-gewricht is klein voor een efficiëntere gewichtsoverdracht tussen wervelkolom en heupgewricht en de heupkom en heupkop zijn groot voor een vergrote gewichtsoverdracht via het heupgewricht. Daartoe is ook de verdeling van hard bot in de dijbeenhals inferior dikker.
Aangezien tijdens de zwaaifase slechts een been op de grond staat, is evenwicht een belangrijke factor. Veel is er dan ook op gericht om de neerwaartse kracht zo dicht mogelijk bij het mediane vlak te houden. De bij andere primaten niet aanwezige Spina iliaca anterior inferior in het darmbeen dient als aanhechtingsplaats voor een sterke darmbeen-dijbeenband, wat helpt het evenwicht te bewaren door te voorkomen dat bij de dij hyperextensie optreedt.
In tegenstelling tot bij primaten heeft het dijbeen van de mens een bicondylaire stand – genua valga of lichte x-benen. Dit is het gevolg van het hoogteverschil tussen de condylen van het dijbeen. De condylus medialis femoris (binnenste knobbel van dijbeen) is langer dan de condylus lateralis femoris (buitenste knobbel). Tijdens extensie (strekking) en flexie (buiging) van de knie draait het scheenbeen ten opzichte van het dijbeen. Zonder deze rotatie zou de buitenste knobbel van het dijbeen bij een gestrekt been het scheenbeen niet meer raken. Bij een gebogen been kan de knie nog vrij roteren, maar in het laatste deel is er een gedwongen exorotatie van het scheenbeen ten opzichte van het dijbeen. Deze slotrotatie geeft de knie extra stabiliteit tijdens hielcontact en afzet.
De onderkant van het scheenbeen staat haaks op de lange as, wat een beweging van de knie recht over de voet mogelijk maakt. Twee plantaire uitsteeksels op het hielbeen maken een stabiel hielcontact mogelijk.
Ook kent de mens een voetgewelf, zowel longitudinaal als dwars, wat werkt als schokdemper en de stijfheid van de voet tijdens de standfase behoudt. Doordat de grote teen niet meer opponeerbaar is, is de voetafzet efficiënter. Een lange voetwortel geeft een efficiëntere hefboomwerking in de voet, net als de korte stralen (middenvoetsbeen en teen) II-V.
Biomechanica
[bewerken | brontekst bewerken]Lopen wordt wel benaderd als een omgekeerde slinger waarbij de interactie tussen potentiële gravitatie-energie en kinetische energie het energieverbruik verminderd. In zijn meest eenvoudige vorm is er in dit model geen voet en buigen de benen niet, gelijkend op steltlopen. Dit zou een zeer inefficiënte manier van lopen zijn door de abrupte richtingsveranderingen van de snelheid. In werkelijkheid buigt de knie wel en is een dubbele omgekeerde slinger met voet en een bewegend bekken een betere benadering.[1]
Kinematica
[bewerken | brontekst bewerken]
Tijdens het lopen verplaatst het zwaartepunt zich zowel verticaal als lateraal. De verticale beweging is een golvende periode van zo'n 5 centimeter met een maximum tijdens de middenstandfase van elk been en een minimum tijdens de bipedale fase. Deze neemt toe bij toenemende loopsnelheid. De verticale golvende beweging ligt tussen de 5 en 10 centimeter en neemt af bij toenemende loopsnelheid.
Daarnaast treedt er een bekkenrotatie op van in totaal zo'n 8° en een axiale rotatie van het been. Die laatste is onder te verdelen in 9° dijbeenrotatie en 9° scheenbeenrotatie. Daarmee wordt de totale axiale rotatie per kant 22°, maar deze kan bij een snelle loop toenemen tot ruim 31°. Daarnaast beweegt het bekken tot zo'n 5° ten opzichte van de horizontaal rond het steunbeen.
De verticale beweging van de enkel komt overeen met het zwaartepunt van het lichaam, dalend vanaf hielcontact tot volcontact om daarna weer te stijgen tot een maximum bij hiel los. Vanaf hielcontact tot ongeveer een derde van de standfase treedt eversie op, beweging van de voetzool van het mediane vlak vlak af, daarna treedt inversie op. In totaal ligt deze rotatie op zo'n 6°.
Bij het lopen zwaaien de armen in kruisgang, tegengesteld aan de beweging van de benen. De tegengestelde reactiekrachten bevorderen het evenwicht.
Getal van Froude
[bewerken | brontekst bewerken]Robert McNeill Alexander kwam met een methode om de gang van dieren van verschillende grootte met elkaar te vergelijken. Hiertoe gebruikte hij het getal van Froude Fr:
waarbij:
- v: snelheid (m/s)
- g: gravitatie (m/s2)
- l: lengte van het achterbeen tot aan de heup
Daarbij wordt het been benaderd als omgekeerde slinger. Het froudegetal is kleiner dan 1 bij lopen voor tweevoetigen of stap voor viervoetigen, aangezien daarboven een zweefmoment ontstaat, maar de overgang naar rennen voor tweevoetigen en draf voor viervoetigen wordt veelal al gemaakt tussen 0,3 en 0,8. Om dichter bij 1 te komen, zou de paslengte af en de pasfrequentie toe moeten nemen tot voor lopen oncomfortabele hoogte.[2] Uitgaande van een gemiddelde beenlengte van 0,9 m voor een volwassene, volgt hieruit dat de maximumloopsnelheid zo'n 3 m/s of 10,7 km/u is, maar dat de overgang naar rennen veelal al wordt gemaakt rond de 1,5 m/s of 5,3 km/u.
Literatuur
[bewerken | brontekst bewerken]- Deckers, J.H.M.; Beckers, D.M.L. (1996): Ganganalyse en looptraining voor de paramedicus, Bohn Stafleu Van Loghum
Noten
[bewerken | brontekst bewerken]- ↑ Saunders, J.B.deC.M.; Inman, V.T.; Eberhart, H.D. (1953): 'The major determinants in normal and pathological gait' in Journal of Bone and Joint Surgery, Volume 35-A, No. 3, p. 543–558. Gearchiveerd op 14 juni 2023.
- ↑ Alexander, R.M. (2003): Principles of Animal Locomotion, Princeton University Press, p. 59