Magnetomeeter

Magnetomeeter või magnetiline andur on magnetvälja ja magneetumise mõõtmise seade.[1] Sõltuvalt tüübist on selle abil võimalik mõõta magnetvälja suunda, tugevust ja muutu ruumipunktis. Magnetomeetreid saab kasutada elektro- ja püsimagnetite kalibreerimiseks. Väga lihtne magnetomeeter on kompass, mille nõel näitab magnetvälja suunda.
Esimese absoluutset magnetvälja tugevust mõõtva magnetomeetri leiutas Carl Friedrich Gauss 1832. aastal.[2] Oluline areng magnetomeetrite ehituses leidis aset 19. sajandil, sealhulgas Halli efekti avastamine, mida kasutatakse laialdaselt ka tänapäeval.
Laialdast kasutust leiab magnetomeeter Maa magnetvälja omaduste uurimisel ja geofüüsilistes uuringutes.
Magnetomeetrit saab kasutada ka metallidetektorina.[3] Kuigi nendega on võimalik tuvastada ainult raudmetalle, on magnetomeetrite tundlikkus palju parem kui traditsioonilistel metallidetektoritel. Kommertsiaalsed magnetomeetrid suudavad suuri mustmetallist esemeid nagu autod ja mahutid leida üle kümne meetri sügavuselt maa alt, metallidetektorid harva üle kahe meetri. Nende abil on võimalik meres leida allveelaevu, mistõttu on suure tundlikkusega magnetomeetrid mõnes riigis liigitatud militaartehnoloogiaks.
Lähiminevikus on magnetomeetrid mõõtmetelt vähenenud ning mahuvad mikroskeemi pakendisse, mistõttu on langenud ka nende hind ning paranenud kättesaadavus väiksemõõtmeliste kompassidena, mis põhinevad elektromehaanilistel mikrosüsteemidel.
Sissejuhatus
[muuda | muuda lähteteksti]Magnetväljad
[muuda | muuda lähteteksti]
Magnetväljad on vektoriaalsed suurused, mis tähendab, et neil on nii suund kui ka tugevus. Magnetilist induktsiooni mõõdetakse SI-ühikutes teslades, CGS-süsteemis kasutatakse gausse, seejuures 10 000 gaussi on üks tesla. Magnetvälja tugevuse ühikuks on SI-süsteemis amper meetri kohta (A/m) ja CGS-süsteemis örsted (Oe). Magnetvälja tugevus on vektor, mis iseloomustab magnetvälja väärtust ühes ruumipunktis.
Maa magnetvälja mõõdetakse tavaliselt nanoteslades (nT), mida nimetatakse vahel ka gammaks. Sõltuvalt asukohast varieerub Maa magnetväli vahemikus 20 000 – 80 000 nT, kõikumine jääb tavaliselt 100 nT suurusjärku. Magnetilised anomaaliad võivad toimuda pikotesla (pT) piirkonnas.
Gaussmeetrid ja teslameetrid on magnetomeetrid, mis mõõdavad magnetilist induktsiooni vastavalt gaussides ja teslades. Sõltuvalt kontekstist nimetatakse aparaate, mis mõõdavad väljatugevusi alla ühe millitesla, magnetomeetriteks ning gaussmeetriteks aparaate, mis mõõdavad sellest suuremaid väljatugevusi.
Magnetomeetritüübid
[muuda | muuda lähteteksti]Magnetomeetreid on kahte põhimõttelist tüüpi: skalaarsed ja vektoriaalsed magnetomeetrid.
- Skalaarsed magnetomeetrid mõõdavad magnetvälja kogutugevust punktis, kuid mitte selle suunda.
- Vektoriaalsed magnetomeetrid mõõdavad magnetvälja vektoriaalseid ruumikomponente.[3]
Absoluutsed magnetomeetrid mõõdavad magnetvälja, kasutades kalibreerimiseks sisemist standardit või kasutades füüsikalisi konstante. Suhtelised magnetomeetrid mõõdavad küll vektorkomponente, kuid kasutavad kalibreerimata nullnivood. Seetõttu nimetatakse neid ka variomeetriteks, kuna neid kasutatakse välja muutuste mõõtmiseks.
Võimekus
[muuda | muuda lähteteksti]Magnetomeetrite sooritusvõimet kirjeldatakse läbi nende tehnilise spetsifikatsiooni. Põhilised andmed on:
- Diskreetimissagedus (ingl k sample rate) on lugemite arv, mida andur kogub sekundi jooksul. Selle pöördväärtus on tsükliperiood ehk aeg, mis kulub ühe lugemi võtmiseks. Diskreetimissagedus on oluline mobiilsetes magnetomeetrites, sest selles sõltub, kui tihedalt ruumis saadakse mõõtpunktid.
- Ribalaius (ingl k bandwidth) kirjeldab, kui hästi suudab andur reageerida suurtele muutustele. Magnetomeetrite, millel puudub sisseehitatud signaalitöötlus, ribalaius on määratud nende Nyquisti sagedusega. Moodsates magnetomeetrites võivad teha sisemist signaali silumist ja keskmistamist, mistõttu väheneb nii nende ribalaius kui ka müra.
- Lahutusvõime (ingl k resolution) on vähim muutus magnetväljas, mida magnetomeeter suudab registreerida. Magnetomeetri lahutusvõime peaks alati olema mitu korda väiksem kui uuritava magnetvälja muutus.
- Kvantiseerimisviga (ingl k quantization error) tekib signaali diskreetimise käigus, kui väärtus on vaja ümardada lõpliku väärtuseni ning arvutada ujukomaarvudega.
- Absoluutne viga on vahe tõelise magnetvälja ja magnetomeetri lugemi vahel.
- Triiv (ingl k drift) on mõõteseadme absoluutse vea muutumine ajas.
- Termiline stabiilsus kirjeldab mõõtetulemuse sõltuvust temperatuuri muutusest. See antakse tavaliselt koefitsiendina ühikutes .
- Müra tekib juhuslikest valesignaalidest, mida tekitavad magnetomeeter ja elektroonika. Müra mõõdetakse ühikutes , kus sageduskomponent viitab ribalaiusele.
- Tundlikkus on suurem kui müra või lahutusvõime.
- Suuna viga tekib kui magnetomeetri pööramisel konstantses magnetväljas.
- Surnud tsoon on nurkvahemik, mille piires ei ole võimalik magnetomeetril mõõta suunamuutust.
- Gradiendi tolerants on magnetomeetri võimekus anda usaldusväärseid tulemusi magnetvälja gradiendis. Plahvatamata lõhkekehade otsimisel võivad gradiendid olla suured.
Varajased magnetomeetrid
[muuda | muuda lähteteksti]Magnetkompass, mis koosneb magneetunud nõelast, mille suund pöördub vastavalt teda ümbritsevale magnetväljale, on lihtne magnetomeeter. Võnkesagedus, millega nõel hakkab tasakaalupunkti ümber võnkuma on võrdeline ruutjuurega selles sihis mõjuvast magnetväljast.
1832. aastal avaldas Göttingeni Geomagnetilise Observatooriumi juhataja Carl Friedrich Gauss artikli Maa magnetvälja mõõtmiste teemal. See kirjeldas uut instrumenti, mis koosnes kullast kiu küljes rippuvast horisontaalsest püsimagnetilisest vardast. Magneeditud ja demagneeditud varda võnkumiste erinevusest arvutas ta esimest korda Maa magnetvälja absoluutse tugevuse.[2][4]
Ühik gauss, mis on CGS-süsteemi ühik magnetvoo tiheduse (maksvell ruutsentimeetri kohta) jaoks, on nimetatud C. F. Gaussi auks ja võrdub 1×10−4 teslaga SI-ühikutes.
Francis Ronalds ja Charles Brooke leiutasid kumbki iseseisvalt magnetograafi 1846. aastal, mis salvestas magnetite liikumist fotograafia abil ning seeläbi kergendas vaatlejate tööd.[5]
Laboratoorsed magnetomeetrid
[muuda | muuda lähteteksti]Laboratoorsed magnetomeetrid mõõdavad uuritava materjali magneetumust ehk magnetmomenti. Erinevalt vaatlusmagnetomeetritest nõuavad laboratoorsed magnetomeetrid tavaliselt proovide paigutamist aparaadi sisse. Sellistes instrumentides saab tihti kontrollida ka proovi temperatuuri, mõjuvat magnetvälja ja muid parameetreid. Katsekeha magneetumus sõltub põhiliselt paardumata elektronidest aatomis, väiksemat mõju omavad ka tuuma magnetmoment ja Larmori diamagnetism. Magnetmomendid klassifitseeritakse peamiselt diamagneetikuteks, paramagneetikuteks, ferromagneetikuteks või antiferromagneetikuteks.
SQUID (ülijuhtiv kvantinterferomeeter)
[muuda | muuda lähteteksti]Pikemalt artiklis SQUID
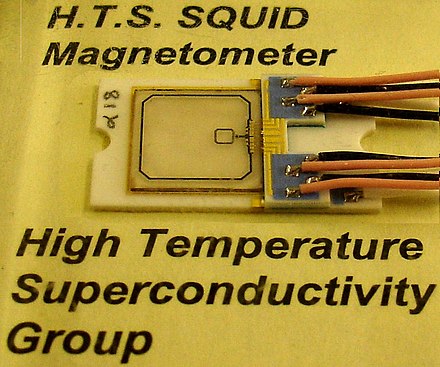
Ülijuhtiv magnetomeeter koosneb ülijuhtivast materjalist rõngast, mis sisaldab kahte Josephsoni siiret. Siirdes on õhuke mittejuhtiva materjali kiht ülijuhtide vahel. Ülijuhis olev elektrivool läbib neid siirdeid tunneliefekti abil. Kui rõngas paigutada magnetvoogu tekib selles täiendav vool, mis on ühes kontaktis toitevooluga pärisuunaline ja teises vastassuunaline. Magnetvoog läbi rõnga saab muutuda ainult magnetvoo kvantide kaupa, sest ülijuhtiv vool tekib Cooperi paaridena. See on ka SQUID-magnetomeetri teoreetiline tundlikkus.
Praktiliselt kasutatakse SQUID tüüpi magnetomeetreid näiteks aju neuronite aktiivsuse uuringutes, kuna seal tekkivad magnetväljad on liiga nõrgad, et muude meetoditega registreerida. Samuti leiavad nad kasutust materjalide omaduste uuringutes, kus proovi kogused on väikesed ning mõõta on vaja täpselt.
Induktiivpoolid
[muuda | muuda lähteteksti]
Induktiivtajurid kasutavad magneetumuse mõõtmiseks induktiivpooli, milles indutseeritav elektrivool sõltub magnetmomendi muutusest. Proovi magneetumust saab muuta kasutades väikest vahelduvvoolu magnetvälja. Sellised mõõtmised nõuavad proovi magnetmomendi ja välise magnetvälja diferentseerimist, mistõttu kasutatakse tihti spetsiaalseid lisapoole. Näiteks üks pool mähisest päripäeva ja teine pool vastupäeva keerdudega ning proov asetatakse ainult ühte poolde. Välise magnetvälja piisava homogeensuse juures tühistavad erisuunalised pooled üksteist ning signaal tekib ainult proovist.
VSM – vibreeriva prooviga magnetomeeter
[muuda | muuda lähteteksti]
Vibreeriva prooviga magnetomeetrid kasutavad katsekeha magneetumuse mõõtmiseks katsekeha mehaanilist vibreerimist induktiivpoolis või SQUID-seadmes ning seejuures mõõdetakse poolis indutseeritud voolu. Vibratsiooni tekitamiseks on tavaliselt elektrimootor või piesoelektriline aktuaator. Tavaline VSM induktiivpooliga on suurusjärgu võrra kehvema tundlikkusega kui SQUID-magnetomeetria, kuid mõlemad tehnikat kombineerides saab parema tundlikkuse kui kummagi tehnikaga iseseisvalt. VSM on ebapraktiline habraste proovidega, mis ei kannata järsku kiirendust.
Vaatlusmagnetomeetrid
[muuda | muuda lähteteksti]Vaatlusmagnetomeetrid võib jagada kahte peamisesse kategooriasse:
- Skalaarsed magnetomeetrid, mis mõõdavad summaarset magnetvälja tugevust, kuid mitte selle suunda.
- Vektoriaalsed magnetomeetrid suudavad määrata ka magnetvälja suuna magnetomeetri ruumilise orienteerituse suhtes.
Vektor on matemaatiline suurus, millel on siht, suund ja pikkus (antud kontekstis magnetvälja tugevus). Maa magnetväli on igas ruumipunktis vektoriaalne suurus. Kui magnetiline kompass näitab ainult magnetvälja suunda, siis vektoriaalne magnetomeeter suudab mõõta lisaks suunale ka magnetvälja tugevust. Tavaliselt kasutaks vektoriaalses magnetomeetris kolme omavahel risti paigutatud tajurit, et leida magnetvälja kõik kolm ruumikomponenti.
Skalaarsed magnetomeetrid
[muuda | muuda lähteteksti]
Prootoni pretsessiooni magnetomeeter
[muuda | muuda lähteteksti]Prootoni pretsessiooni magnetomeetrid, mida nimetatakse ka lihtsalt prootoni magnetomeetriteks, mõõdavad prootonite resonantssagedust magnetväljas, mis tekib tuumamagnetresonantsi tõttu. Kuna pretsessioonisagedus sõltub rangelt ainult atomaarsetest konstantidest ja ümbritsevast magnetväljast, siis saavutatakse sellise magnetomeetriga täpsusi kuni 1 ppm.[6]
Sellises magnetomeetris liigub alalisvool läbi solenoidi, mis tekitab vesinikurikka vedeliku (tihti petrooleum või dekaan) ümber tugeva magnetvälja, mis omakorda põhjustab osade prootonite joondumist solenoidi magnetvälja vektoriga. Kui elektrivool solenoidis katkestatakse ning prootonid hakkavad ennast ümbritseva magnetvälja suunas orienteerima, hakkavad nad võnkuma uue tasakaaluoleku ümber diskreetse sagedusega, mis sõltub ümbritseva magnetvälja tugevusest. Sellest tekkiv nõrk võnkuv magnetväli loetakse üles elektrilise induktoriga, võimendatakse ja saadetakse sagedusloendurisse, mille väljund teisendatakse magnetvälja tugevuseks.
Overhauseri efekti magnetomeeter
[muuda | muuda lähteteksti]Overhauseri magnetomeeter kasutab sama fundamentaalset efekti, mida kasutab ka prootoni pretsessiooni magnetomeeter. Lisades mõõtevedelikku vabu radikaale, saab kasutada Overhauseri efekti ning parandada seadme efektiivsust. Prootonite solenoidiga joondamise asemel kasutatakse madala võimsusega raadiosageduslikku välja, millega joondatakse elektronide spinn vabades radikaalides, mis omakorda paardub prootonitega läbi Overhauseri efekti. Sellisel lähenemisel on kaks põhilist eelist: raadiosagedusliku välja tekitamine nõuab murdosa energiast ning kiirem diskreetimine kuna elektron-prooton paardumine võib toimuda ka mõõtmise ajal. Overhauseri magnetomeeter suudab registreerida väljatugevusi standardhälbega 0,02 nT diskreetimissagedusel 1 sämpel sekundis.
Overhauseri magnetomeetrit saab kasutada ligikaudu 3 korda suuremas magnetvälja tugevuse gradiendis kui prootoni magnetomeetrit.
Väiksema energiatarbe tõttu tehakse kaasaskantavaid Overhauseri efekti magnetomeetreid (näiteks USA ettevõte GEM Systems).
Vektoriaalsed magnetomeetrid
[muuda | muuda lähteteksti]Vektoriaalsed magnetomeetrid mõõdavad magnetvälja üht või rohkemat ruumikomponenti elektrooniliselt. Kasutades kolme omavahel risti paigutatud magnetomeetrid on võimalik Pythagorose teoreemi kasutades välja arvutada magnetvälja suund ruumis.
Vektoriaalsed magnetomeetrid on tundlikud temperatuuri ja ferriitsüdamike mõõtmete ebastabiilsustele. Samuti vajavad nad enne kasutamist loodimist ja nullimist erinevalt skalaarsetest magnetomeetritest. Seetõttu ei kasutata neid enam mineraalide otsimisel.
Pöörleva pooli magnetomeeter
[muuda | muuda lähteteksti]Staatiline magnetväli tekitab pöörlevas poolis sinusoidaalse elektrivoolu. Tekkiva elektrisignaali amplituud on võrdeline magnetvälja tugevusega ning siinusega nurgast pooli pöörlemistelje ja välja jõujoonte vahel. Selline magnetomeetri disain on aegunud.
Halli efekti magnetomeeter
[muuda | muuda lähteteksti]

Halli efektil põhinevad paljud olmeelektroonikas kasutatavad magnetvälja andurid. Kõige levinum magnetomeeter on pooljuhtelektroonikaga Halli tajur. Need andurid tekitavad magnetvälja tugevusele vastava proportsionaalse elektripinge, mille polaarsus sõltub omakorda magnetvälja suunast. Halli tajur põhineb Halli efektil, mis kirjeldab, kuidas elektrijuhis tekib ristuva magnetvälja toimel laengukandjate eraldumine. Laialdast kasutust leiavad nad selliste pöörlevate masinaosade nagu rataste ja võllide pöörlemissageduse mõõtmisel. Näiteks kasutatakse neid andureid autode mootorites väntvõlli kiiruse mõõtmisel ja ABS-pidurisüsteemis rataste pöörlemiskiiruse mõõtmisel.
Magnetotakistuslikud seadmed
[muuda | muuda lähteteksti]Magnetotakistuslikud seadmed on tavaliselt õhukesed permalloi (nikkel-raud 80/20%) ribad, mille elektritakistus muutub välise magnetvälja toimel. Sellistel ribadel on hästi defineeritud tundlikkustelg, neid saab toota kolmemõõtmelisena ning neid saab massiliselt toota mikroskeemina. Sellise seadme reageerimisaeg on alla ühe mikrosekundi ning neid saab kasutada liikuvates sõidukites diskreetimissagedusel kuni 1000 Hz.[7]

Fluxgate-magnetomeeter
[muuda | muuda lähteteksti]Fluxgate-tüüpi (fluxgate – ingl k 'voovärav') magnetomeetri leiutasid H. Aschenbrenner ja G. Goubau 1936. aastal.[8] Victor Vacquier' juhitud Gulf Research Laboratoriese meeskond arendas lennukitele paigaldatavaid fluxgate-magnetomeetreid allveelaevade leidmiseks teise maailmasõja ajal ning pärast sõda kinnitas plaattektoonika teooriat, mõõtes magnetilisi mustri nihkeid merepõhjas.
Fluxgate-magnetomeeter koosneb väikesest, magnetilise vastuvõtlikkusega südamikust, mille ümber on mähitud kaks pooli. Rakendades vahelduvvoolu esimesele poolile viiakse südamik kordamööda mõlemas suunas magnetilise küllastumiseni ning selle kõigus tekkiv elektrivool registreeritakse teise pooliga. Välise magnetvälja puudumisel tekib mõlemas suunas sümmeetriline elektrivool. Kui magnetomeetrile rakendub väline magnetväli, siis on ühes suunas magneetumine lihtsustatud ja teises raskendatud, mis viib ka asümmeetrilise vooluni teises poolis. Tekkivat vahe registreerides on võimalik määrata välise magnetvälja tugevus.
Kui sellist magnetomeetrit pöörata või paigutada neid mitu erineva nurga all, on võimalik määrata magnetvälja tugevuse sõltuvust magnetomeetri suunast ning seeläbi ka magnetvälja suunda. Tavaliselt paigutatakse seda tüüpi magnetomeetri poole mitu tükki samasse seadmesse, et vältida mehaanilise ajami vajalikkust.
Kalibreerimine
[muuda | muuda lähteteksti]Magnetomeetreid kalibreeritakse tavaliselt poolide abil, milles tekib elektrivoolu toimel magnetväli. Nii saab karakteriseerida ka magnetomeetri tundlikkust ehk reaktsiooni magnetvälja muudule. Paljudel juhtudel on tähtis magnetvälja homogeensus magnetomeetri ümber ning seetõttu kasutatakse tihti Helmholtzi poole ühe- või kolmeteljelises seadmes. Eriti nõudlikel juhtudel saab kalibreerimiseks kasutada ka Maxwelli poole, koosinuspoole ja väga homogeenset Maa magnetvälja.
Magnetomeetri kasutusalad
[muuda | muuda lähteteksti]Magnetomeetreid kasutatakse paljudes valdkondades, näiteks:
- arheoloogias: arheoloogiliste paikade või maa-aluste objektide tuvastamisel;
- sõjaväes: merepõhjas allveelaevade liikumise jälgimisel;
- maavarade kaevandamisel: maakide tuvastamisel, õli või gaasi leidmiseks;
- mobiiltelefonides: kompassi kalibreerimiseks.
Vaata ka
[muuda | muuda lähteteksti]Viited
[muuda | muuda lähteteksti]- ↑ Eesti Keele Sihtasutus. "Õigekeelsussõnaraamat: "magnetomeeter"". Vaadatud 24.01.2019.
- ↑ 2,0 2,1 Gauss, C.F. (1932). "The Intensity of the Earth's Magnetic Force Reduced to Absolute Measurement" (PDF). Vaadatud 24.01.2019.
- ↑ 3,0 3,1 Steven A. Macintyre. Magnetic Field Measurement. Kasutatud 27.05.2015.
- ↑ Hunt, I. (1996). The life of Gauss. Encyclopaedia Brittanica.
- ↑ Ronalds, Beverly F. (2016). "The Beginnings of Continuous Scientific Recording using Photography: Sir Francis Ronalds' Contribution". European Society for the History of Photography. Vaadatud 27.01.2019.
- ↑ Hrvoic, I. (2010). "Requirements for Obtaining High Accuracy With Proton Magnetometers" (PDF). GEM Systems Inc. Originaali (PDF) arhiivikoopia seisuga 12. detsember 2013. Vaadatud 27.01.2018.
- ↑ Caruso, Michael J. (2010). "Applications of Magnetoresistive Sensors in Navigation Systems" (PDF). Honeywell Inc. Originaali (PDF) arhiivikoopia seisuga 5. juuli 2010. Vaadatud 27.01.2019.
- ↑ Musmann, Günter (2010). Fluxgate Magnetometers for Space Research. Norderstedt. ISBN 9783839137024.