Teoria de control

La teoria de control és una part de la teoria de sistemes que tracta la regulació.[1] En la seva expressió més senzilla és l'estudi de fenòmens com per exemple: «quan la bota és plena s'ha de tancar l'aixeta». Conté la consigna o el resultat desitjat[1] «bota plena», el controlador (una persona o un sènsor que mesura l'estat de la bota) i una acció: tancar l'aixeta (canvi de comportament). Es crea un llaç de control (de vegades anomenat amb l'anglicisme feedback loop).
Tal regulació pot esdevenir més complexa, per exemple: «Quan l'aigua té 40 °C, la bota és plena, s'ha de tancar l'aixeta i fer un senyal sonor, i s'ha d'utilitzar un mínim d'energia i d'aigua.» o encara: «cal produir exactament prou aigua a 40 °C en comptar amb les necessitats futures en aigua calenta del sistema segons l'hora del dia, comprar l'energia quan és més barata i utilitzar amb preferència la calor residual de les màquines.»
El fenomen existeix des que l'home va utilitzar eines. Inicialment tot era manual: ambdós el sensor i el controlador era una persona humana. A poc a poc va esdevenir més complex quan l'humà va desenvolupar sistemes de mesura més precisos i controls mecànics. Un exemple senzill de sensor i controlador mecànic i automàtic, desenvolupat al segle xix és la boia de depòsit d'aigua al vàter. La teoria de control es va desenvolupar quan els processus controlats van esdevenir més complexos, els sensors electrònics (instruments de mesura) van esdevenir més fiables, petits i de bon preu i que els controladors (motors, micromotors…) van esdevenir assequibles. Sensors i controladors van esdevenir un producte de massa que produeixen grans quantitats de dades que els ordinadors que saben integrar i compilar amb rapidesa i accionar un gran nombre de controladors. Finalment, l'internet va permet de recaptar dades i controlar alhora operacions en multiples llocs. La teoria de control desenvolupa els models matemàtics per realitzar tals operacions complexos.
Tot i que manera d'obtenir un canvi de comportament d'un sistema dinàmic mitjançant accions externes,[2] forma la base de la regulació. És un camp interdisciplinari de l'enginyeria, la matemàtica, informàtica amb aplicacions en l'economia, la biologia, l'agricultura… i qualsevol activitat humana o industrial.[2]
Història
[modifica]
Tot i que hi ha sistemes de control de diferents tipus que daten de l'antiguitat, una anàlisi més formal del camp no va arribar fins a l'anàlisi de la dinàmica del regulador centrífug, dut a terme pel físic James Clerk Maxwell l'any 1868, en un article titulat On Governors.[3] Ja s'havia utilitzat el regulador centrífug per regular la velocitat dels molins de vent.[4] Maxwell va descriure i analitzar el fenomen de l'auto-oscil·lació, en què retards en el sistema poden donar lloc a una sobrecompensació i a un comportament inestable. Això generava interès en el camp, durant la qual el company de classe de Maxwell Edward John Routh, va abstraure els resultats de Maxwell per a la classe general de sistemes linels.[5] Independentment, Adolf Hurwitz va analitzar l'estabilitat dels sistemes utilitzant equacions diferencials l'any 1877, donant lloc al que es coneix avui en dia com el teorema de Routh–Hurwitz.[6][7]
Una aplicació notable del control dinàmic va ser en l'àrea dels vols tripulats. Els germans Wright van fer els seus primers vols de prova el 17 de desembre de 1903, i la seva habilitat a l'hora de controlar el vol durant un període llarg de temps va ser clau (més que no pas la seva habilitat de produir sustentació a partir d'un perfil alar, cosa que ja se sabia fer). Un control continu i segur de l'avió era necessari per vols que duressin més que uns segons.
Durant la Segona Guerra Mundial, la teoria de control ja era una àrea de recerca important. La matemàtica i enginyera alemanya Irmgard Flügge-Lotz va desenvolupar la teoria de sistemes de control automàtic discontinus, i va aplicar el principi de tot o res al desenvolupament d'equipament de control aeri en pilot automàtic per a aeronaus.[8][9] Altres àrees d'aplicació dels controls discontinus incloïen sistemes de control del foc, sistemes de guiatge i electrònica.
De vegades, s'utilitzen mètodes mecànics per millorar l'estabilitat dels sistemes. Per exemple, els estabilitzadors dels vaixells són aletes que es troben sota l'aigua i que emergeixen lateralment. En bucs contemporanis, poden ser aletes actives controlades a partir de giròscops, que tenen la capacitat de canviar el seu angle d'atac per contrarestar el balanceig causat pel vent o per les onades que actuen sobre la nau.
Control de llaç obert i de llaç tancat (retroalimentació)
[modifica]
Fonamentalment, hi ha dos tipus de llaços de control: control de llaç obert (o feedforward), i control de llaç tancat (feedback o retroalimentació).
En control de llaç obert, l'acció de control del controlador és independent de l'"output del procés" (o de la "variable del procés controlat"). Un bon exemple d'això és una caldera de calefacció central controlat únicament per un temporitzador, de tal manera que l'escalfor s'aplica durant un temps constant, independentment de la temperatura de l'edifici. L'acció de control és l'encesa/apagat de la caldera, però la variable controlada hauria de ser la temperatura de l'edifici, però no ho és perquè es tracta d'una caldera de control en llaç obert, que no aplica control de llaç tancat de la temperatura.
En el control de llaç tancat, l'acció de control del controlador depèn de l'output del procés. En el cas de l'analogia de la caldera això inclouria un termòstat per monitorar la temperatura de l'edifici, i per tant retroalimenta una senyal per assegurar que el controlador manté l'edifici a la temperatura marcada pel termostat. Un controlador de llaç tancat per tant té un llaç de retroalimentació que assegura que el controlador exerceix una acció de control per fer que l'output d'un procés sigui el mateix que un "input de referència" o un "valor fix". Per aquesta raó, els controladors de llaç tancat també es coneixen com a controladors de retroalimentació o de feedback.[10]
La definició d'un sistema de control de llaç tancat segons la British Standard Institution és "un sistema de control que fa seguiment del seu feedback, la senyal de desviació formada com a resultat que aquest feedback s'utilitzi per control l'acció d'un element de control final, de tal manera que tendeixi a reduir la desviació a zero."[11]
Similarment; "Unsistema de control de feedback és un sistema que tendeix a mantenir una relació prescrita entre una de les variables del sistema amb un altre valor a partir de comparar funcions respecte d'aquestes variables i utilitzar la diferència com a mitjà de control."[12]
Teoria del control lineal i no lineal
[modifica]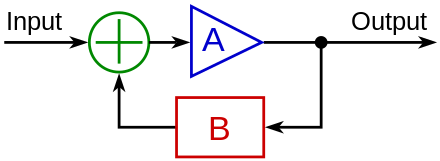
El camp de la teoria del control es pot dividir en dues branques:
- Teoria del control lineal – Aplica a sistemes fets amb dispositius que segueixen el principi de superposició, que vol dir a grans trets que loutput és proporcional a l'input. Aquests sistemes estan governats per equacions diferencials lineals. Una de les seves principal subclasses són els sistemes que a més tenen paràmetres que no canvien amb el temps, anomenats sistemes LTI. Aquests sistemes es presten a tècniques matemàtiques molt potents en el domini de la freqüència de gran generalitat, com la transformada de Laplace, la transformada de Fourier, la transformada Z, els diagrames de Bode, l'anàlisi del locus arrel i el criteri d'estabilitat de Nyquist. Donen a lloc a una descripció del sistema que utilitza termes com l'amplada de banda, la resposta en freqüència, els valors propis, el guany, les freqüències de ressonància, els zeros i pols, que donen solucions de la resposta del sistema i de tècniques de disseny per a la majoria de sistemes d'interès.
- Teoria de control no lineal – Aquesta branca cobreix una classe més àmplia de sistemes que no obeeixen el principi de superposició, i aplica a sistemes del món real ja que tots els sistemes de control reals són non lineals. Aquests sistemes solen estar governats per equacions diferencials no lineals. Les poques tècniques matemàtiques que s'han desenvolupat per estudiar aquests sistemes són més difícils i molt més generals i sovint s'apliquen només a categories molts concretes de sistemes. Aquests mètodes inclouen la teoria dels cicles límit, les aplicacions de Poincaré o el teorema d'estabilitat de Liapunov. Sovint s'analitzen els sistemes no lineals utilitzant mètodes numèrics en ordinadors, per exemple simulant la seva operació mitjançant un llenguatge de simulació. Si només interessen les solucions a prop d'un punt estable, els sistemes no lineals es poden linealitzar aproximant-los a un sistema lineal utilitzant teoria de les pertorbacions, i es poden utilitzar tècniques lineals.[13]
Referències
[modifica]- ↑ 1,0 1,1 Grau, Antoni. «3.4 Teoria de control». A: Automàtica i sostenibilitat. Barcelona: Edicions UPC, 2006, p. 59-60 (Temes de tecnologia i sostenibilitat). ISBN 978-84-9880-019-7.
- ↑ 2,0 2,1 «Teoria de control». Gran Enciclopèdia Catalana. Barcelona: Grup Enciclopèdia Catalana.
- ↑ Maxwell, J.C. «On Governors». Proceedings of the Royal Society of London, 16, 1868, pàg. 270–283. DOI: 10.1098/rspl.1867.0055. JSTOR: 112510.
- ↑ ; Zuazua, E.«Control Theory: History, Mathematical Achievements and Perspectives». Boletin de la Sociedad Espanola de Matematica Aplicada. Arxivat de l'original el 2024-04-11. [Consulta: 15 juliol 2024].
- ↑ Routh, Edward John. Stability of Motion (en anglès). Taylor & Francis, 1975. ISBN 978-0-85066-091-3. Arxivat 2024-07-15 a Wayback Machine.
- ↑ Routh, E.J.. A Treatise on the Stability of a Given State of Motion, Particularly Steady Motion: Particularly Steady Motion. Macmillan and co., 1877.
- ↑ Hurwitz, A. «On The Conditions Under Which An Equation Has Only Roots With Negative Real Parts». Selected Papers on Mathematical Trends in Control Theory, 1964. Arxivat de l'original el 2024-07-15 [Consulta: 15 juliol 2024].
- ↑ Flugge-Lotz, Irmgard; Titus, Harold A. «Optimum and Quasi-Optimum Control of Third and Fourth-Order Systems». Stanford University Technical Report, 134, 10-1962, pàg. 8–12. Arxivat de l'original el 27 abril 2019.
- ↑ Hallion, Richard P.. Notable American Women: The Modern Period: A Biographical Dictionary. Cambridge, Mass.: Belknap Press of Harvard University Press, 1980, p. 241–242. ISBN 9781849722704.
- ↑ "Feedback and control systems" - JJ Di Steffano, AR Stubberud, IJ Williams. Schaums outline series, McGraw-Hill 1967
- ↑ Mayr, Otto. The Origins of Feedback Control. Clinton, MA USA: The Colonial Press, Inc., 1970.
- ↑ Mayr, Otto. The Origins of Feedback Control. Clinton, MA USA: The Colonial Press, Inc., 1969.
- ↑ «Find trim point of dynamic system - MATLAB trim». Arxivat de l'original el 2023-10-15. [Consulta: 9 setembre 2023].
Bibliografia
[modifica]- Amat, Josep. «La teoria de control i la independència de Catalunya» (vídeo). Institut d'Estudis Catalans, 25-01-2013.
- Åström, Karl J.; Murray, Richard M. Feedback Systems: An Introduction for Scientists and Engineers.. Princeton University Press, 2008. ISBN 0691135762.
- Bush, Vannevar. Operational Circuit Analysis. John Wiley and Sons, Inc., 1929.
- Franklin et al.. Feedback Control of Dynamic Systems. 4. New Jersey: Prentice Hall, 2002. ISBN 0-13-032393-4.
- Goodwin, Graham. Control System Design. Prentice Hall, 2001. ISBN 0-13-958653-9.
- Hellerstein, Joseph L.; Tilbury, Dawn M.; Parekh, Sujay. Feedback Control of Computing Systems. John Wiley and Sons, 2004. ISBN 0-47-126637-X, ISBN 978-0-471-26637-2.
- Hinrichsen, Diederich; Pritchard, Anthony J. Mathematical Systems Theory I - Modelling, State Space Analysis, Stability and Robustness. Springer, 2005. ISBN 978-3-540-44125-0.
- Kilian, Christopher. Modern Control Technology. Thompson Delmar Learning, 2005. ISBN 1-4018-5806-6.
- Neculai, Andrei. Modern Control Theory - A historical Perspective, 2005.
- Real i Casals, Anna. Arturo Vieiro Yanes. Teoria de control clàssica per sistemes dinàmics continus. Universitat de Barcelona, 2020.
- Sontag, Eduardo. Mathematical Control Theory: Deterministic Finite Dimensional Systems. Second Edition. Springer. ISBN 0-387-984895.
- Stengel, Robert F. Optimal Control and Estimation. Dover Publications, 1994. ISBN 0-486-68200-5, ISBN 978-0-486-68200-6.