数学上的线性化 (linearization)是找函数 在特定点的线性近似 ,也就是函数在该点的一阶泰勒级数 。在动力系统 研究中,线性化是分析非线性 微分方程 系统或是非线性离散系统,在特定平衡点 局部稳定性 的一种方法[ 1] 工程学 、物理学 、经济学 及生态学 的应用中。
函数 的线性化为线性函数 。针对函数
y
=
f
(
x
)
{\displaystyle y=f(x)}
x
=
a
{\displaystyle x=a}
斜率 来进行近似时,假设
f
(
x
)
{\displaystyle f(x)}
[
a
,
b
]
{\displaystyle [a,b]}
[
b
,
a
]
{\displaystyle [b,a]}
x
=
a
{\displaystyle x=a}
4
=
2
{\displaystyle {\sqrt {4}}=2}
4.001
=
4
+
.001
{\displaystyle {\sqrt {4.001}}={\sqrt {4+.001}}}
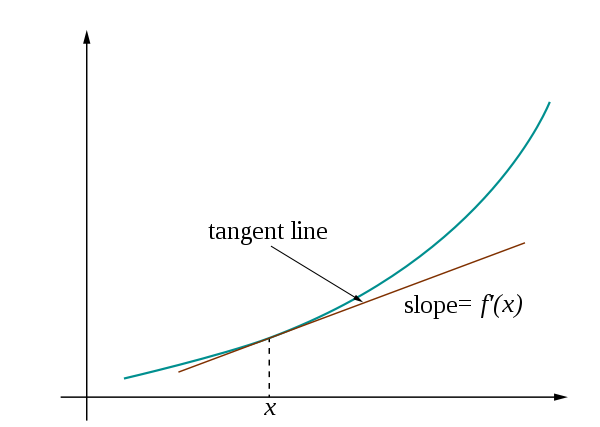
针对任意函数
y
=
f
(
x
)
{\displaystyle y=f(x)}
f
(
x
)
{\displaystyle f(x)}
L
a
(
a
)
=
f
(
a
)
{\displaystyle L_{a}(a)=f(a)}
L
a
(
x
)
{\displaystyle L_{a}(x)}
f
(
x
)
{\displaystyle f(x)}
x
=
a
{\displaystyle x=a}
一次方程 的图形会形成直线,例如通过点
(
H
,
K
)
{\displaystyle (H,K)}
M
{\displaystyle M}
y
−
K
=
M
(
x
−
H
)
{\displaystyle y-K=M(x-H)}
若是配合点
(
a
,
f
(
a
)
)
{\displaystyle (a,f(a))}
L
a
(
x
)
{\displaystyle L_{a}(x)}
y
=
f
(
a
)
+
M
(
x
−
a
)
{\displaystyle y=f(a)+M(x-a)}
局部线性 ,该点的斜率可以用
f
(
x
)
{\displaystyle f(x)}
x
=
a
{\displaystyle x=a}
函数局部线性的意思也表示函数图形上的点可以任意接近 点
x
=
a
{\displaystyle x=a}
M
{\displaystyle M}
x
=
a
{\displaystyle x=a}
f(x)=x^2在(x , f (x ))的近似值 旁边的图可以说明
f
(
x
)
{\displaystyle f(x)}
x
{\displaystyle x}
f
(
x
+
h
)
{\displaystyle f(x+h)}
h
{\displaystyle h}
f
(
x
+
h
)
{\displaystyle f(x+h)}
(
x
+
h
,
L
(
x
+
h
)
)
{\displaystyle (x+h,L(x+h))}
函数在点
x
=
a
{\displaystyle x=a}
y
=
(
f
(
a
)
+
f
′
(
a
)
(
x
−
a
)
)
{\displaystyle y=(f(a)+f'(a)(x-a))}
针对
x
=
a
{\displaystyle x=a}
f
(
a
)
=
f
(
x
)
{\displaystyle f(a)=f(x)}
f
(
x
)
{\displaystyle f(x)}
f
′
(
x
)
{\displaystyle f'(x)}
f
(
x
)
{\displaystyle f(x)}
a
{\displaystyle a}
f
′
(
a
)
{\displaystyle f'(a)}
若要找
4.001
{\displaystyle {\sqrt {4.001}}}
4
=
2
{\displaystyle {\sqrt {4}}=2}
f
(
x
)
=
x
{\displaystyle f(x)={\sqrt {x}}}
x
=
a
{\displaystyle x=a}
y
=
a
+
1
2
a
(
x
−
a
)
{\displaystyle y={\sqrt {a}}+{\frac {1}{2{\sqrt {a}}}}(x-a)}
f
′
(
x
)
=
1
2
x
{\displaystyle f'(x)={\frac {1}{2{\sqrt {x}}}}}
f
(
x
)
=
x
{\displaystyle f(x)={\sqrt {x}}}
x
{\displaystyle x}
代入
a
=
4
{\displaystyle a=4}
y
=
2
+
x
−
4
4
{\displaystyle y=2+{\frac {x-4}{4}}}
针对
x
=
4.001
{\displaystyle x=4.001}
4.001
{\displaystyle {\sqrt {4.001}}}
2
+
4.001
−
4
4
=
2.00025
{\displaystyle 2+{\frac {4.001-4}{4}}=2.00025}
函数
f
(
x
,
y
)
{\displaystyle f(x,y)}
p
(
a
,
b
)
{\displaystyle p(a,b)}
f
(
x
,
y
)
≈
f
(
a
,
b
)
+
∂
f
(
x
,
y
)
∂
x
|
a
,
b
(
x
−
a
)
+
∂
f
(
x
,
y
)
∂
y
|
a
,
b
(
y
−
b
)
{\displaystyle f(x,y)\approx f(a,b)+\left.{\frac {\partial f(x,y)}{\partial x}}\right|_{a,b}(x-a)+\left.{\frac {\partial f(x,y)}{\partial y}}\right|_{a,b}(y-b)}
多变数函数
f
(
x
)
{\displaystyle f(\mathbf {x} )}
p
{\displaystyle \mathbf {p} }
f
(
x
)
≈
f
(
p
)
+
∇
f
|
p
⋅
(
x
−
p
)
{\displaystyle f({\mathbf {x} })\approx f({\mathbf {p} })+\left.{\nabla f}\right|_{\mathbf {p} }\cdot ({\mathbf {x} }-{\mathbf {p} })}
其中
x
{\displaystyle \mathbf {x} }
p
{\displaystyle \mathbf {p} }
[ 2]
配合线性化的技术,可以用研究线性系统 的工具来分析非线性系统在特定点附近的行为。函数在特定点附近的线性化是在该点附近泰勒级数 的一阶展开。针对以下的系统
d
x
d
t
=
F
(
x
,
t
)
{\displaystyle {\frac {d\mathbf {x} }{dt}}=\mathbf {F} (\mathbf {x} ,t)}
其线性化系统为
d
x
d
t
≈
F
(
x
0
,
t
)
+
D
F
(
x
0
,
t
)
⋅
(
x
−
x
0
)
{\displaystyle {\frac {d\mathbf {x} }{dt}}\approx \mathbf {F} (\mathbf {x_{0}} ,t)+D\mathbf {F} (\mathbf {x_{0}} ,t)\cdot (\mathbf {x} -\mathbf {x_{0}} )}
其中
x
0
{\displaystyle \mathbf {x_{0}} }
D
F
(
x
0
)
{\displaystyle D\mathbf {F} (\mathbf {x_{0}} )}
F
(
x
)
{\displaystyle \mathbf {F} (\mathbf {x} )}
x
0
{\displaystyle \mathbf {x_{0}} }
雅可比矩阵 。
在自治系统 的稳定性 分析中,可以用在双曲平衡点 雅可比矩阵 的特征值 来判断平衡点的特征。这就是线性化理论 [ 3]
在微观经济学 中,决策规则 [ 4] 效用最大化 的欧拉方程 可以在平稳稳态附近进行线性化[ 4] [ 4]
在最优化 中,成本函数以及非线性成分都可以线性化,以使用一些线性的求解方式(例如单纯形法 )。最佳化的结果可以更有效率的产生,而且是决定性的全域极值 。
在多物理场 系统(系统中有多个不同物理领域的模型,彼此互相影响)中,可以针对每一个物理领域进行线性化。针对每一个物理领域的线性化可以产生线性的monolithic方程系统,可以用monolithic的迭代来求解(例如牛顿法 )。这类的例子包括MRI scanner [ 5]
^ The linearization problem in complex dimension one dynamical systems at Scholarpedia . [2020-04-10 ] . (原始内容存档 于2018-07-04). ^ Linearization. The Johns Hopkins University. Department of Electrical and Computer Engineering 互联网档案馆 的存档 ,存档日期2010-06-07.^ Leonov, G. A.; Kuznetsov, N. V. Time-Varying Linearization and the Perron effects. International Journal of Bifurcation and Chaos. 2007, 17 (4): 1079–1107. doi:10.1142/S0218127407017732 ^ 4.0 4.1 4.2 Moffatt, Mike. (2008) Dotdash State-Space Approach (页面存档备份 ,存于互联网档案馆 )
^ Bagwell, S.; Ledger, P. D.; Gil, A. J.; Mallett, M.; Kruip, M. A linearised hp –finite element framework for acousto-magneto-mechanical coupling in axisymmetric MRI scanners. International Journal for Numerical Methods in Engineering. 2017, 112 (10): 1323–1352. doi:10.1002/nme.5559