Canadarm2
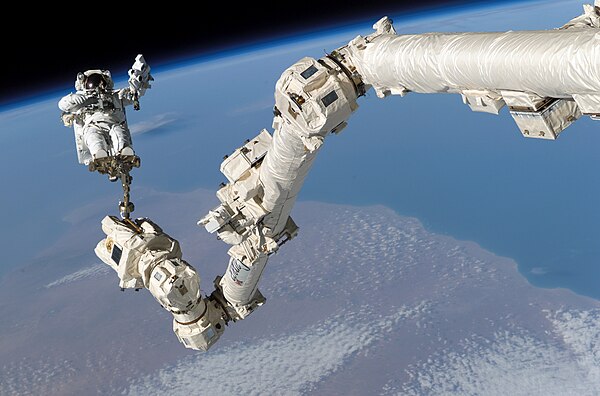
ระบบซ่อมบำรุงเคลื่อนที่ (อังกฤษ: Mobile Servicing System หรือ MSS) หรือเป็นที่รู้จักกันมากกว่าในชื่อของชิ้นส่วนหลักของระบบคือ Canadarm2 เป็นระบบแขนกลและอุปกรณ์ประกอบที่ติดตั้งอยู่บนสถานีอวกาศนานาชาติ มีบทบาทสำคัญอย่างยิ่งในการประกอบชิ้นส่วนและการบำรุงรักษาสถานี โดยการเคลื่อนย้ายอุปกรณ์และเครื่องมือต่างๆ ไปรอบสถานี การสนับสนุนการทำงานในอวกาศของนักบินอวกาศ และการบำรุงรักษาเครื่องมือวัดหรือชิ้นส่วนอื่นๆ ที่ติดตั้งอยู่กับสถานีอวกาศ นักบินอวกาศต้องผ่านการฝึกฝนเป็นพิเศษเพื่อทำการควบคุมเครื่องมือนี้ในการจัดการกับระบบต่างๆ
ระบบ MMS ประกอบด้วยแขนกลหลักที่เรียกว่า Space Station Remote Manipulator (SSRMS), Mobile Remote Servicer Base System (MBS) และ Special Purpose Dexterous Manipulator (SPDM บางครั้งก็เรียกว่า Dextre หรือ แขนแคนาดา) ระบบแขนกลต่างๆ จะเคลื่อนที่ไปตามรางที่ติดตั้งอยู่บนยอดของสถานีอวกาศนานาชาติ ซอฟต์แวร์ควบคุมการทำงานเขียนขึ้นด้วยภาษาเอดา[1]
ระบบบริการเคลื่อนที่ได้รับการออกแบบและก่อสร้างภายใต้โครงการอวกาศ MDA (เดิมคือระบบหุ่นยนต์ MD) ขององค์การอวกาศแคนาดา ในฐานะส่วนสนับสนุนหนึ่งในโครงการสถานีอวกาศนานาชาติ
อ้างอิง
[แก้]- ↑ "Case Study: MDA - Canadian Space Arm" (PDF). AdaCore. คลังข้อมูลเก่าเก็บจากแหล่งเดิม (PDF)เมื่อ 2010-12-02. สืบค้นเมื่อ 2009-10-15.
แหล่งข้อมูลอื่น
[แก้]- ISS Assembly: Canadarm2 กับระบบบริการเคลื่อนที่ เก็บถาวร 2008-03-28 ที่ เวย์แบ็กแมชชีน
- ข้อมูลจากองค์การอวกาศแคนาดา เกี่ยวกับ Canadarm2 เก็บถาวร 2008-10-02 ที่ เวย์แบ็กแมชชีน
บทความการบินอวกาศนี้ยังเป็นโครง คุณสามารถช่วยวิกิพีเดียได้โดยการเพิ่มเติมข้อมูล ดูเพิ่มที่ สถานีย่อย:การบินอวกาศ |