Quadrotor

Un quadrotor, quadrocòpter o quadrirotor és una aeronau helicòpter amb quatre rotors per la seva sustentació i la seva propulsió. Els quatre rotors estan generalment col·locats a l'extremitat d'una creu. A fi d'evitar que l'aparell es tombi respecte al seu eix d'orientació cal que dues hèlixs girin en un sentit i les altres dues en l'altre sentit.
Per poder dirigir l'aparell cal que cadascun dels parells d'hèlixs girin en el mateix sentit. El control del moviment del vehicle s'aconsegueix variant la velocitat relativa de cada rotor per canviar l'empenta i el parell motor produït per cadascun.
Història

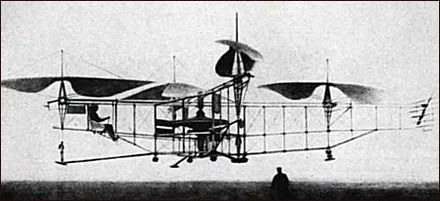
Aquests vehicles van estar entre els primers més pesants que l'aire i d'enlairament vertical amb èxit malgrat que els primers aparells tenien un rendiment pobre.[1] L'any 1922 el nord-americà George de Bothezat va ser el primer a fer volar un aparell quadrirotorr[2] però sense aixecar-se més de 5 metres del sòl i l'exèrcit dels Estats Units finalment va posar fi al contracte que mantenia amb ell.
A Europa, el quadrirotor del francès Étienne Œhmichen, construït el 1922, va aconseguir un vol estacionari de cinc minuts el juny de 1923 i el 1924 es va enlairar fins a 10 metres del sòl fent un vol de set minuts de durada.
Actualment es proposa que els quadrirotors siguin maquetes teledirigides no tripulades (UAVs) en aeromodelisme[3] o per exemple per lluitar contra les glaçades en l'agricultura.[4]
Vegeu també
Referències
- ↑ Leishman, J.G.. Principles of Helicopter Aerodynamics. New York, NY: Cambridge University Press, 2000.
- ↑ (anglès) De Bothezat helicopter - All the World's Helicopters and Rotorcraft
- ↑ «Arduino-based quadcopter». Arxivat de l'original el 2011-12-11. [Consulta: 9 desembre 2011].
- ↑ Agrodigital. com
Enllaços externs
- Estabilització d'un quadrirotor Arxivat 2009-11-23 a Wayback Machine., pdf